▼Arduino-ESP32「03:サーボモーター制御」

まずは、サーボモーターを制御するためのライブラリー(ESP32 Servo)をインストールします。 それぞれの違いは、使用するサーボの制御範囲「ESP32Servo(0~180度)/ESP32Servo360(0~360 …
まずは、サーボモーターを制御するためのライブラリー(ESP32 Servo)をインストールします。 それぞれの違いは、使用するサーボの制御範囲「ESP32Servo(0~180度)/ESP32Servo360(0~360 …

今回は、ESP32同士の通信を学びます。まずは、2個のESP32モジュールを準備します。 まずは、各モジュールに割り当てられた「MACアドレス」の情報を調べる必要があります。この情報は、モジュール内部に持っていますので、 …

まずは、開発モジュールおよびプログラム環境の準備から始めます。 ▼開発ボード ESP32開発ボード Wi-Fi + BLEモジュール ESP-WROOM-32 まずは、手始めにこちらのモジュールでテストを行います。 ▼P …
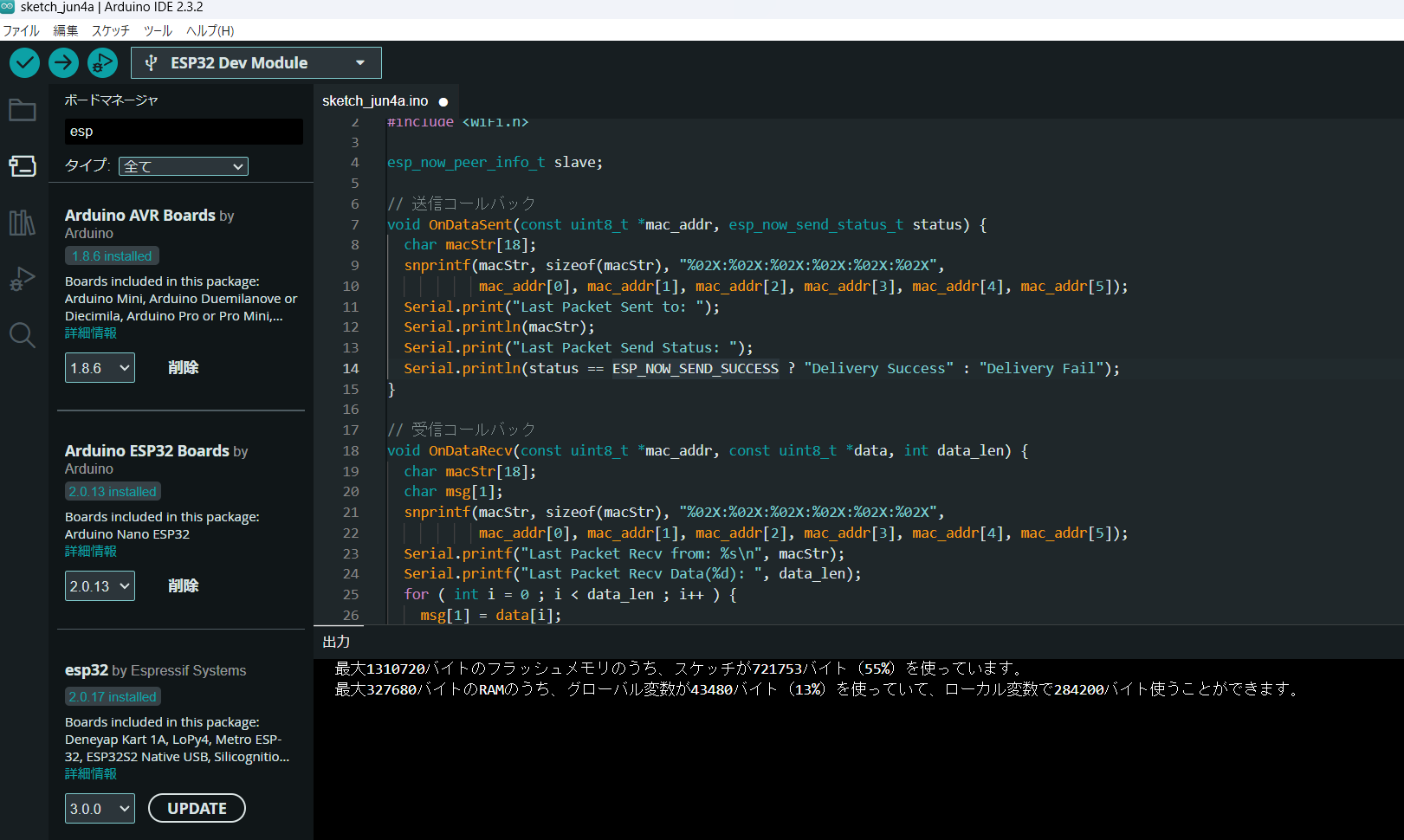
▼ESP32サンプルプログラム実行におけるコンパイルエラーについて ネットに多数のサンプルプログラムが公開されていますが、いざコンパイルするとエラーが頻発します。これは、バージョンアップに伴うコード体系の変更に伴うもので …

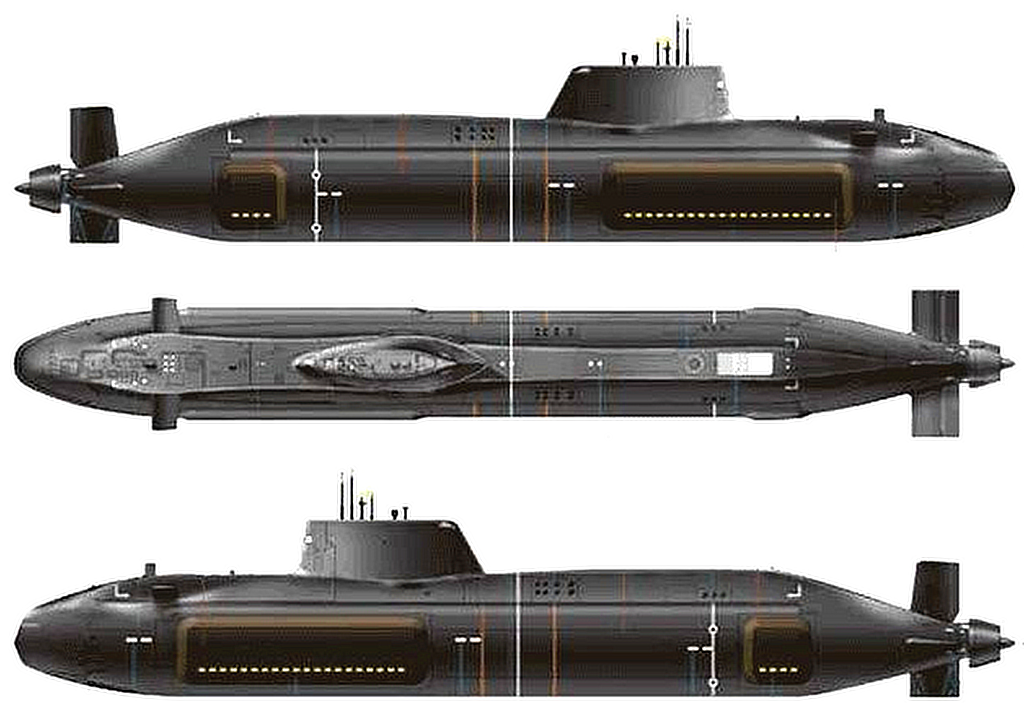
HMS Astute (S119) は、イギリス海軍の原子力潜水艦です。アスチュート級原子力潜水艦の1番艦でネームシップです。1997年1月31日にゼネラル・エレクトリック・カンパニーの子会社マルコーニ・マリーン(現在の …
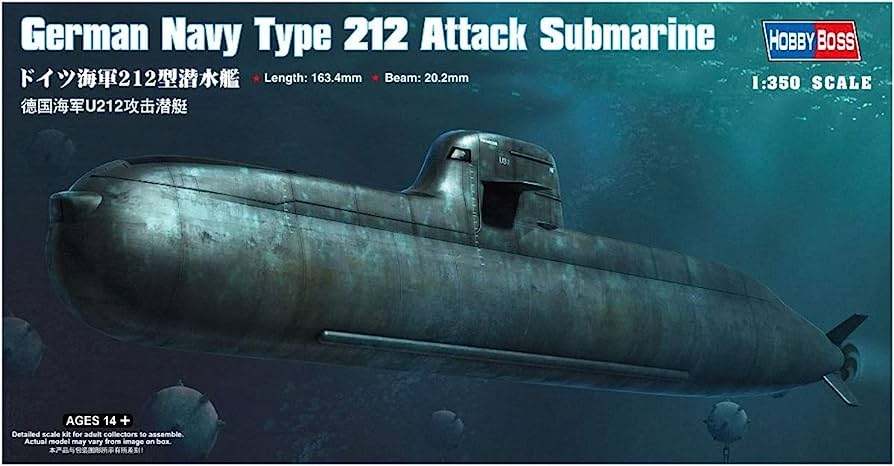
船体の上下を接着して継ぎ目消しを行ってから、サーフェイサーを吹きます。 基本色による塗装が終ったところで、仕上げ塗装に入ります。 まずは、横のラインに沿って薄くブルーをかけていきます。そのあとシルバーを10倍に薄めて全体 …