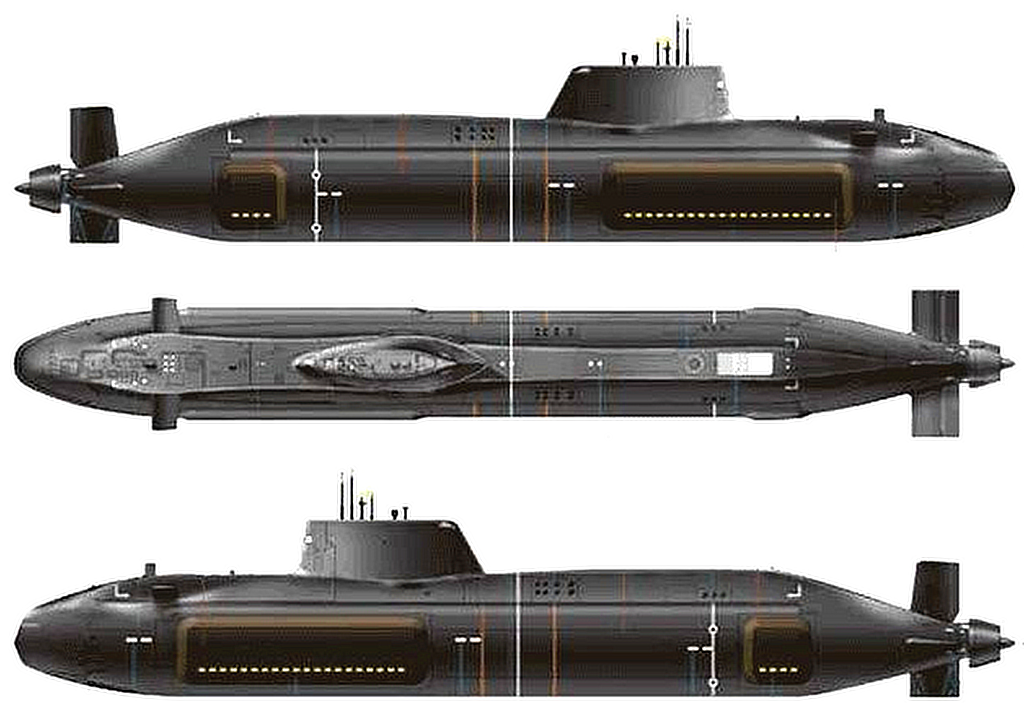
HMS Astute (S119) は、イギリス海軍の原子力潜水艦です。アスチュート級原子力潜水艦の1番艦でネームシップです。1997年1月31日にゼネラル・エレクトリック・カンパニーの子会社マルコーニ・マリーン(現在のBAEシステムズ・サブマリン・ソリューションズ)に発注され、2001年1月31日にキールを据えて起工され、2007年6月8日にコーンウォール公爵夫人(のちの王妃)カミラにより進水式が執り行われました。
制作にあたっては、まずは潜水の仕組みを理解する必要があります。
▼無線操縦機
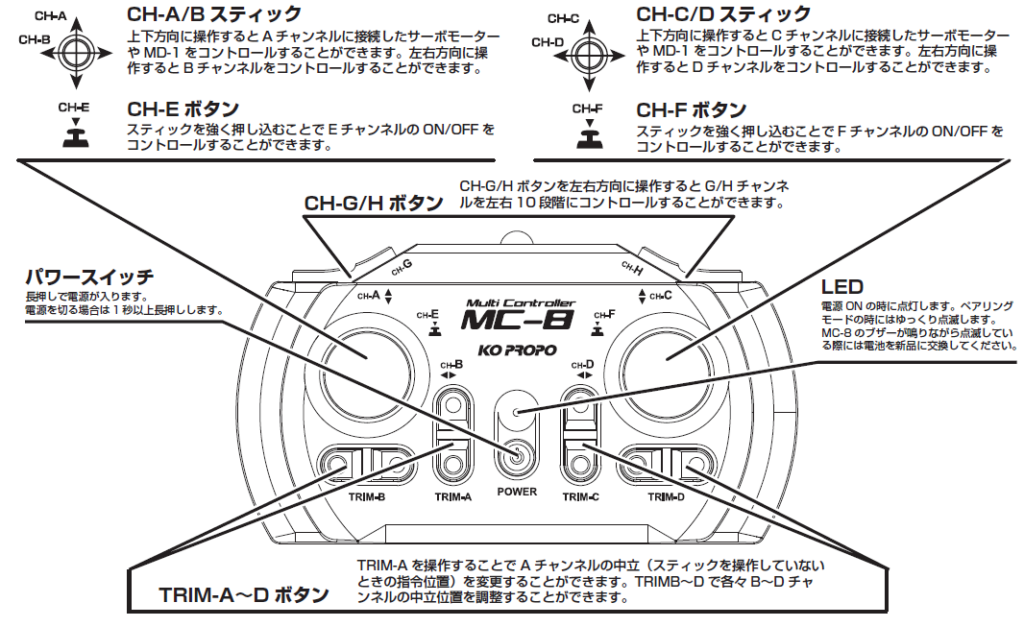
送信機と受信機は、近藤科学株式会社から「MC-8 2.4GHz」を選択しました。
<主なスペック>
【送信機 MC-8】
●2.4GHz MX-F方式 マルチコントローラー
●サイズ:150.0×84.5×61.0mm
●重量:145.5g(電池含まず)
●電源:単4乾電池、単4型充電式電池×4本(別売)
●消費電流:50mA以下
連続17時間以上使用可能(条件により異なります)
●チャンネル数:8
スティック操作4系統 + スイッチ操作4系統
●送信周波数帯:2.4GHz

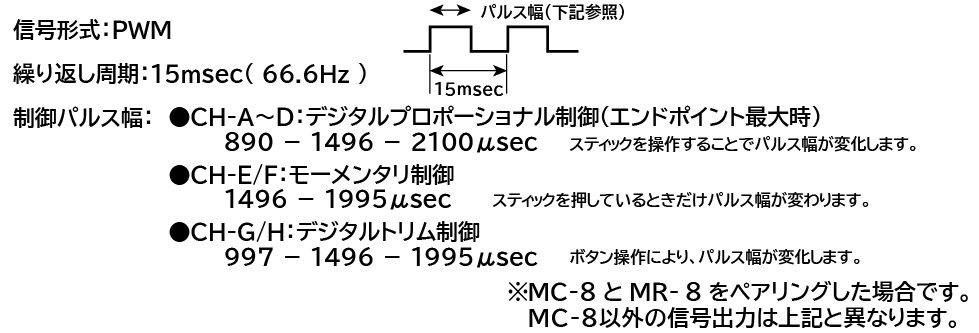
マイコンボード接続による信号幅データ
パルス幅の仕様
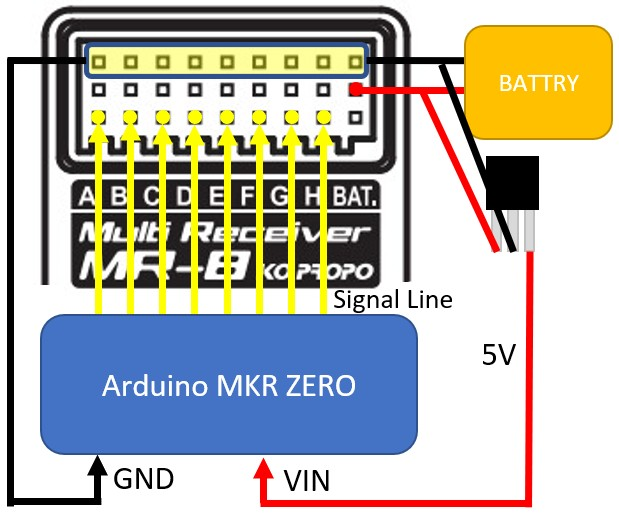
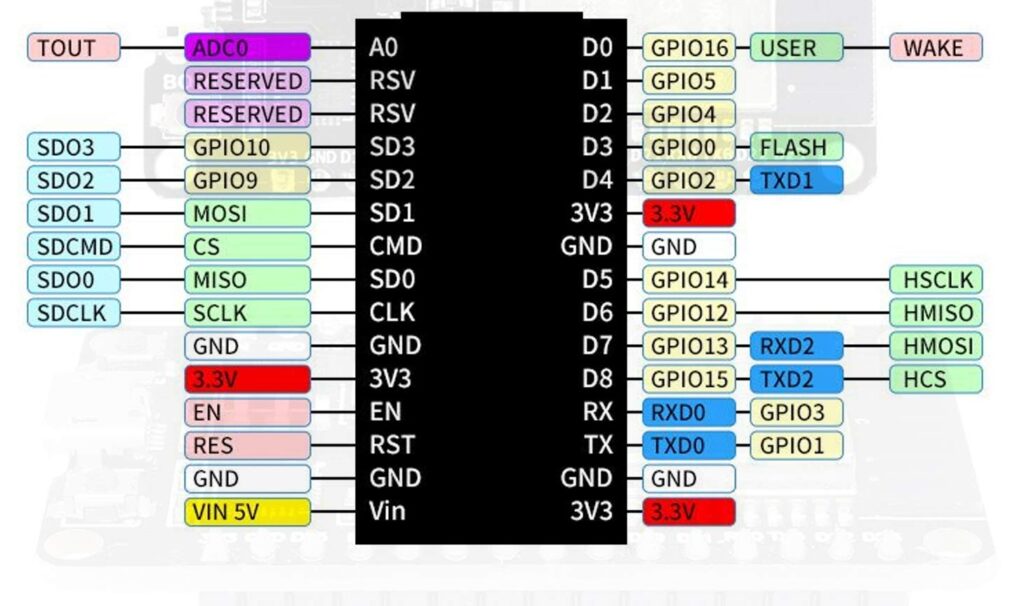
▼ESP32開発ボード
次により多機能な制御を実現するため、ESP32マイコンボード接続します。
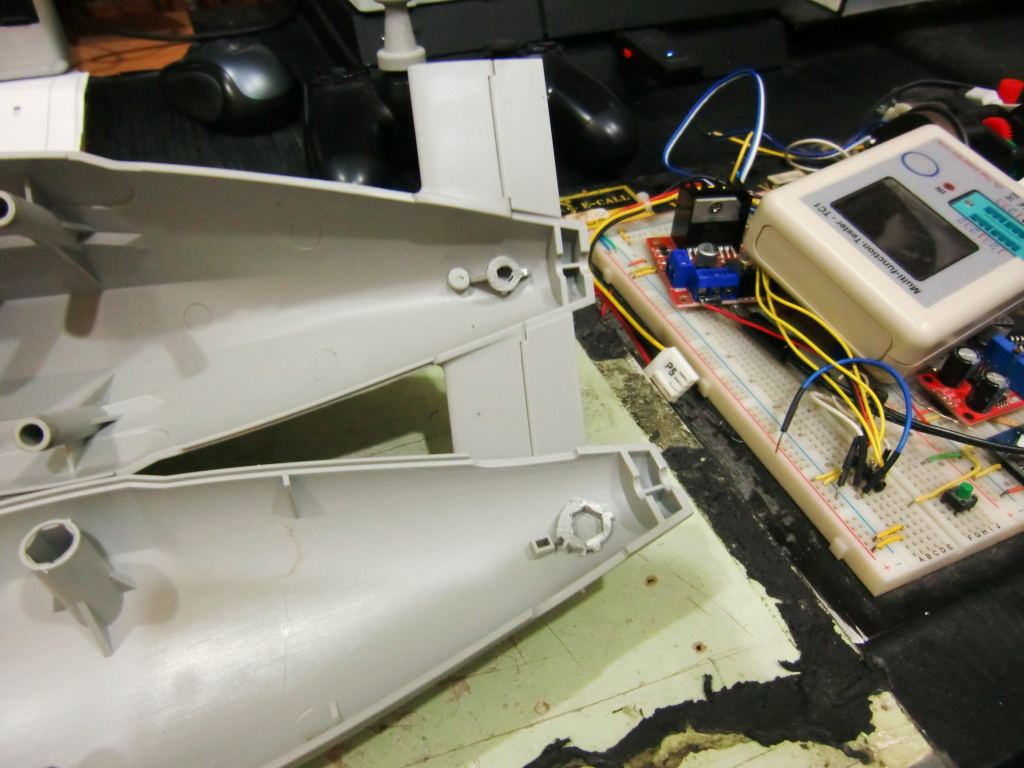
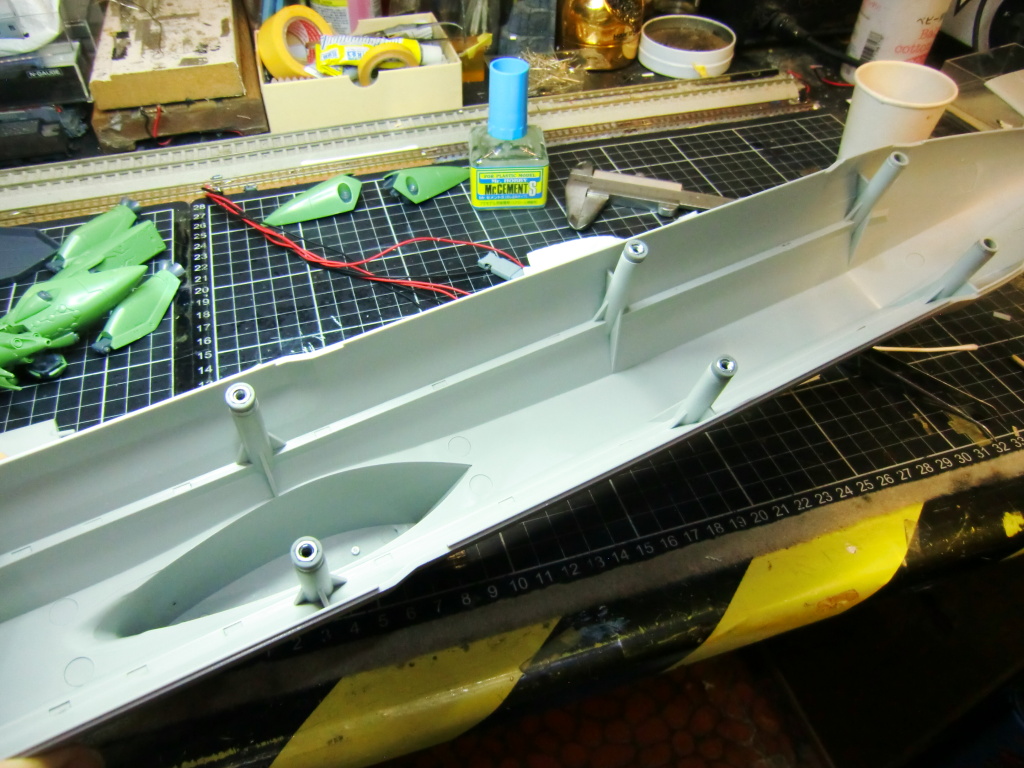
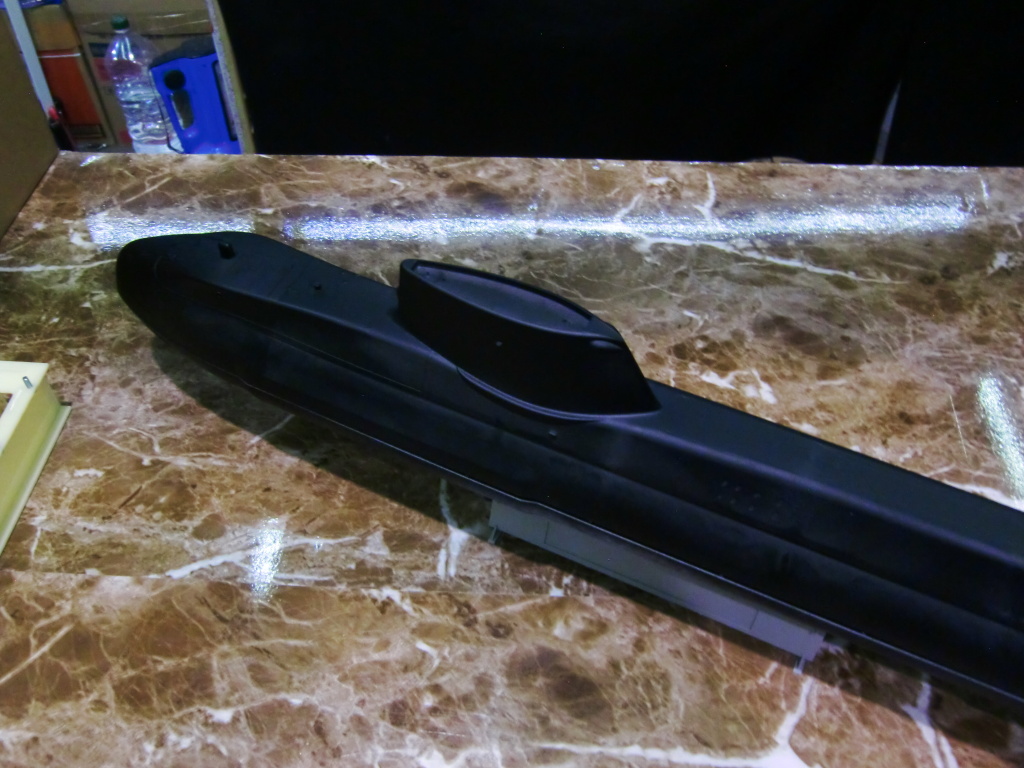
▼船体の制作
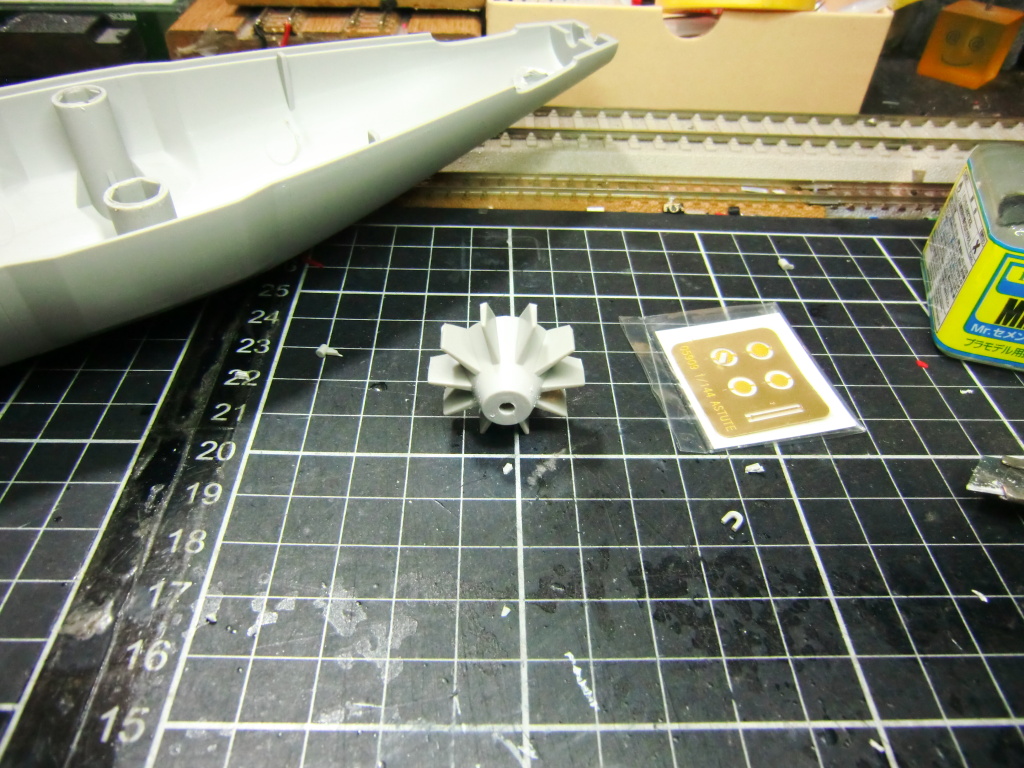
ベースとなるキットは、「トランぺッター 1/144 イギリス海軍 原子力潜水艦 HMS アスチュート」/全長:約65センチ

まずは仮組を行います。


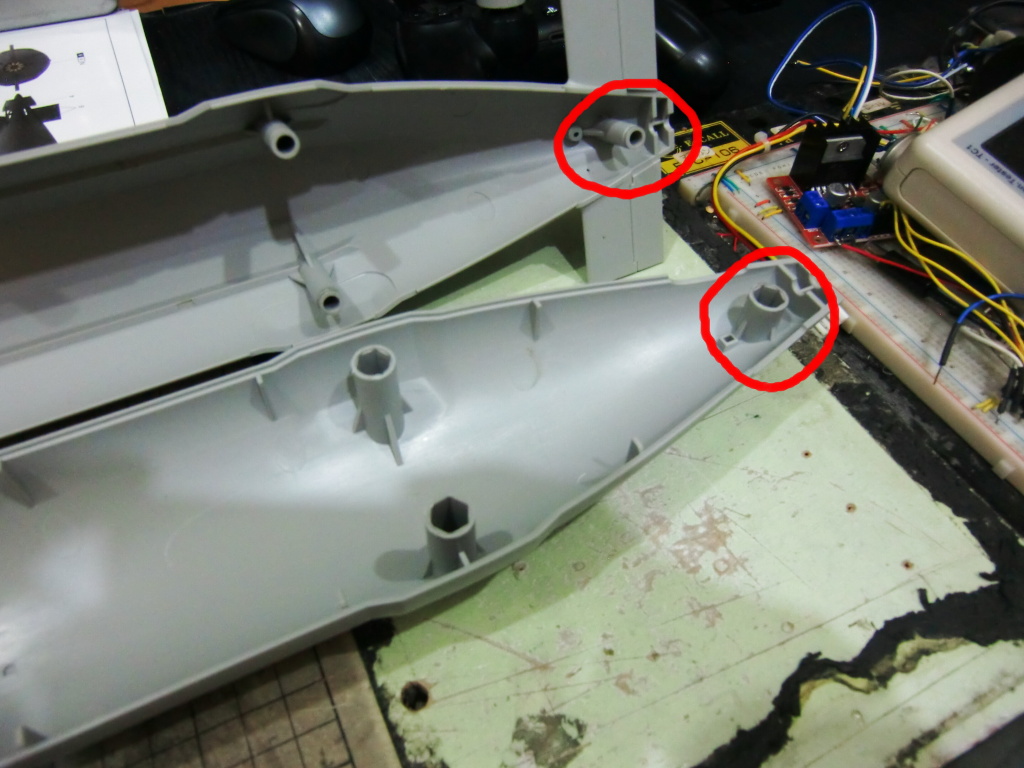
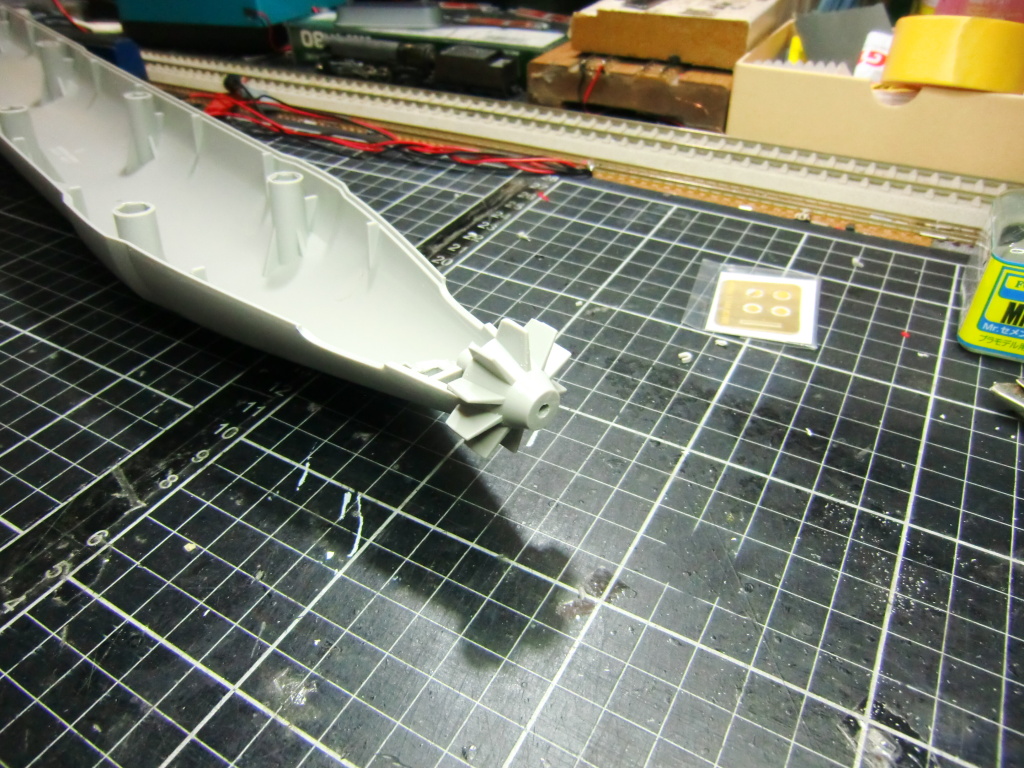
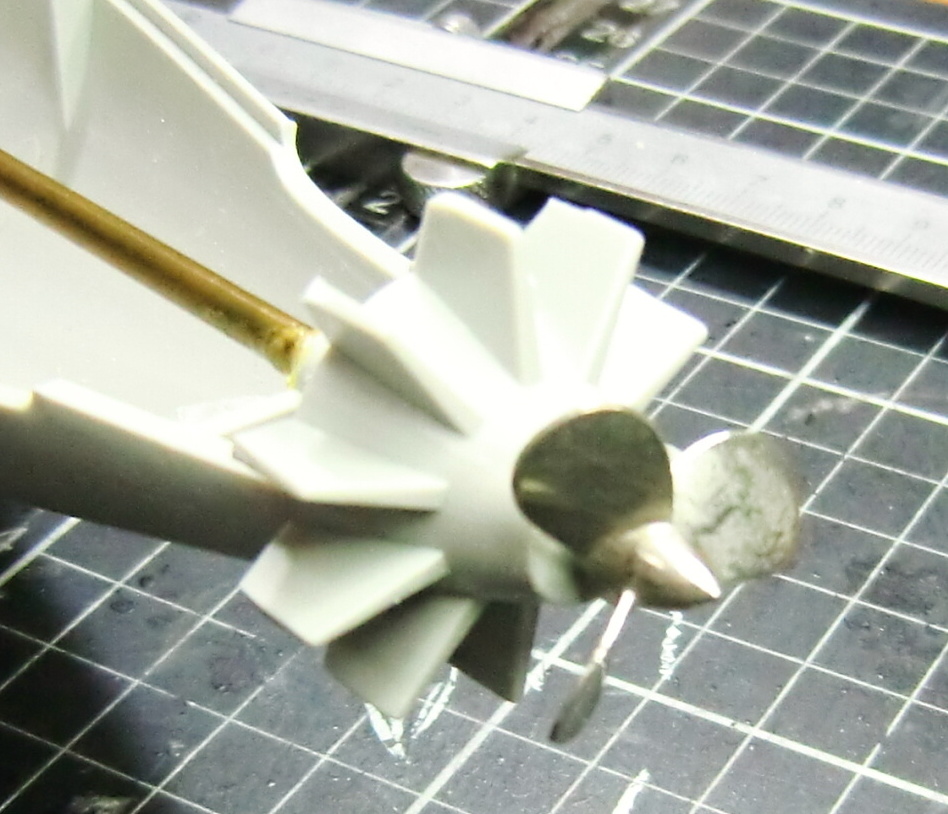
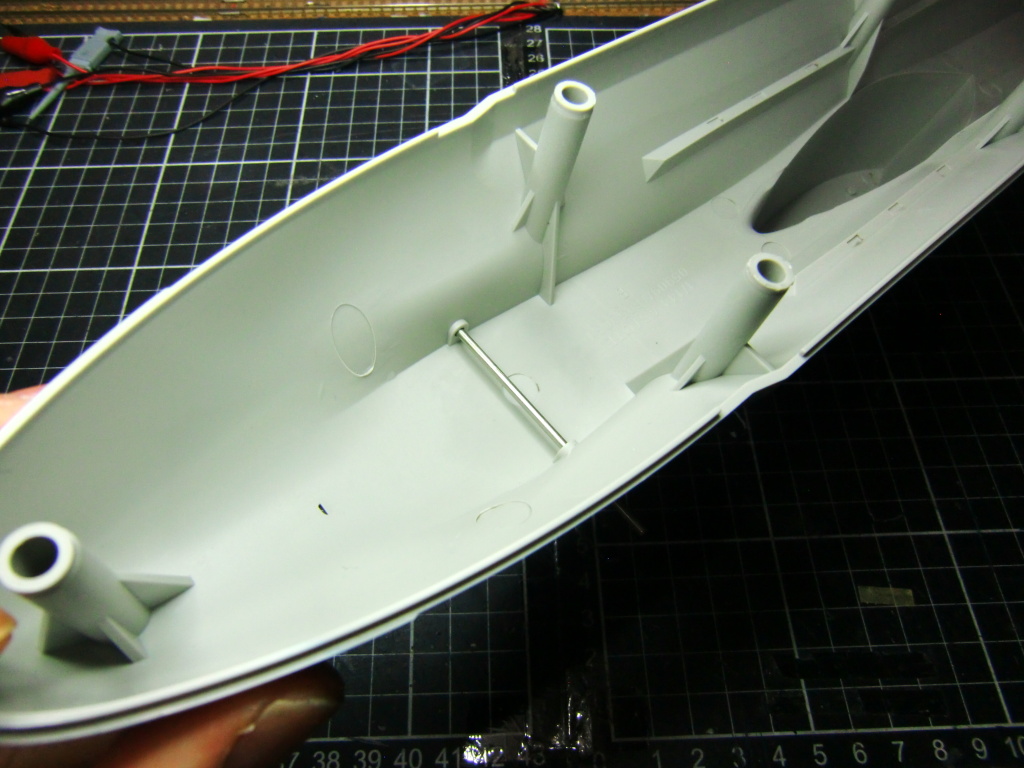
赤丸の突起をカットしてスクリューを設置するスペースを確保します。
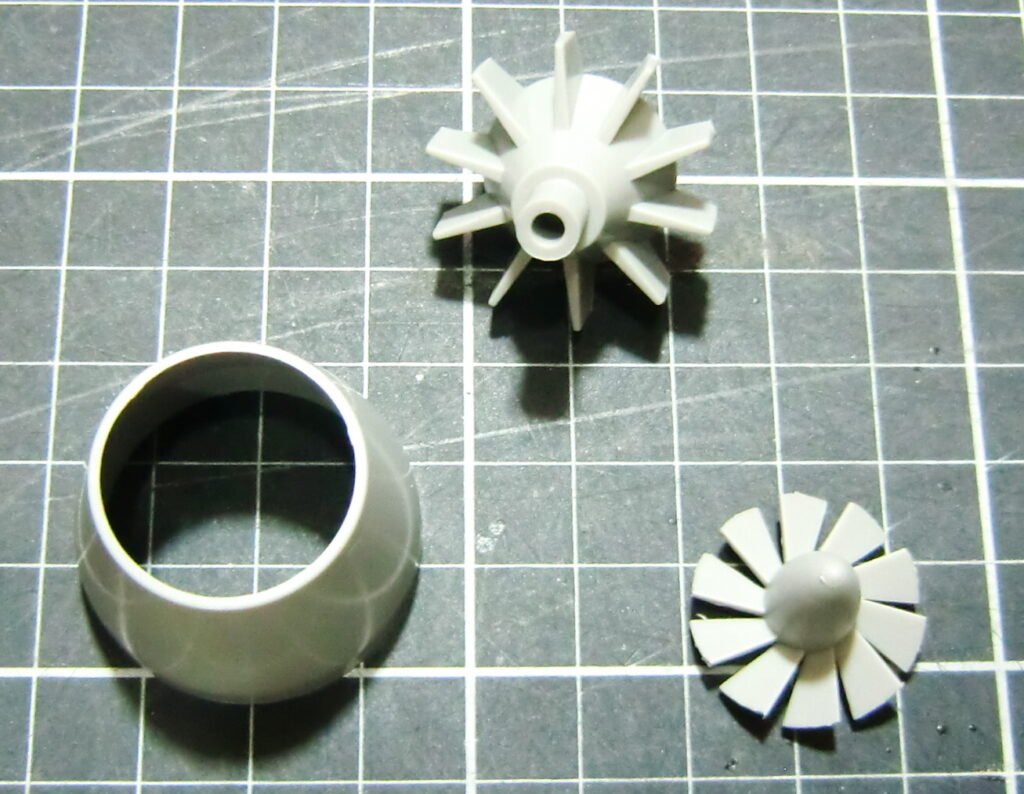
パイプを通す穴をあけます。
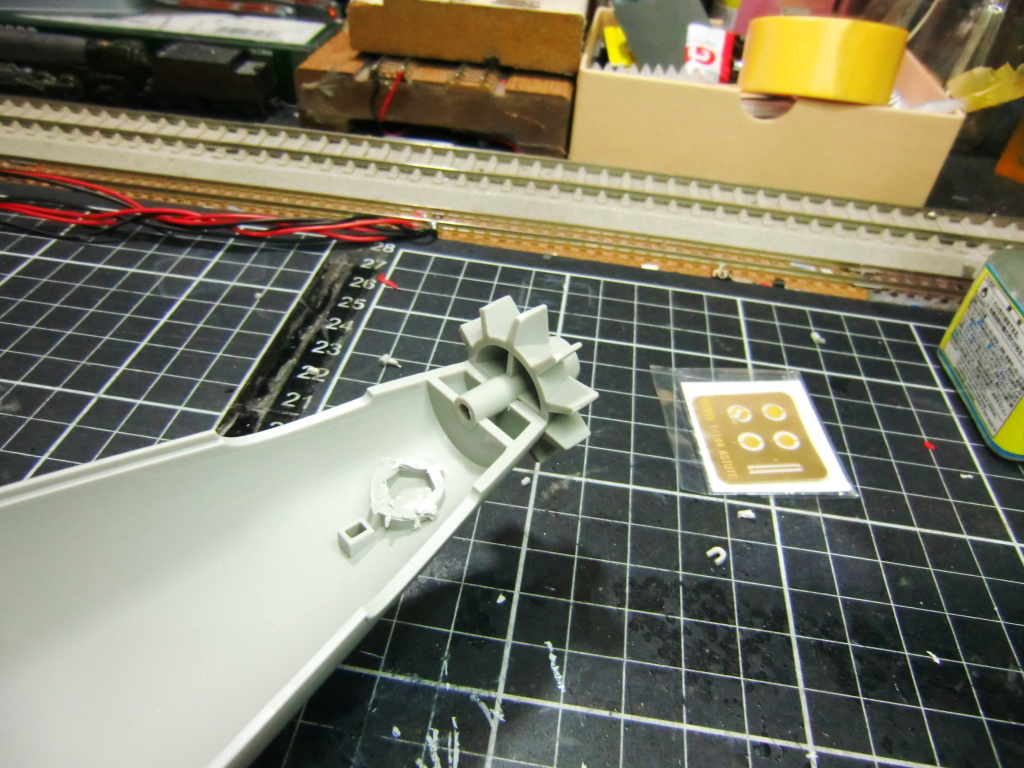
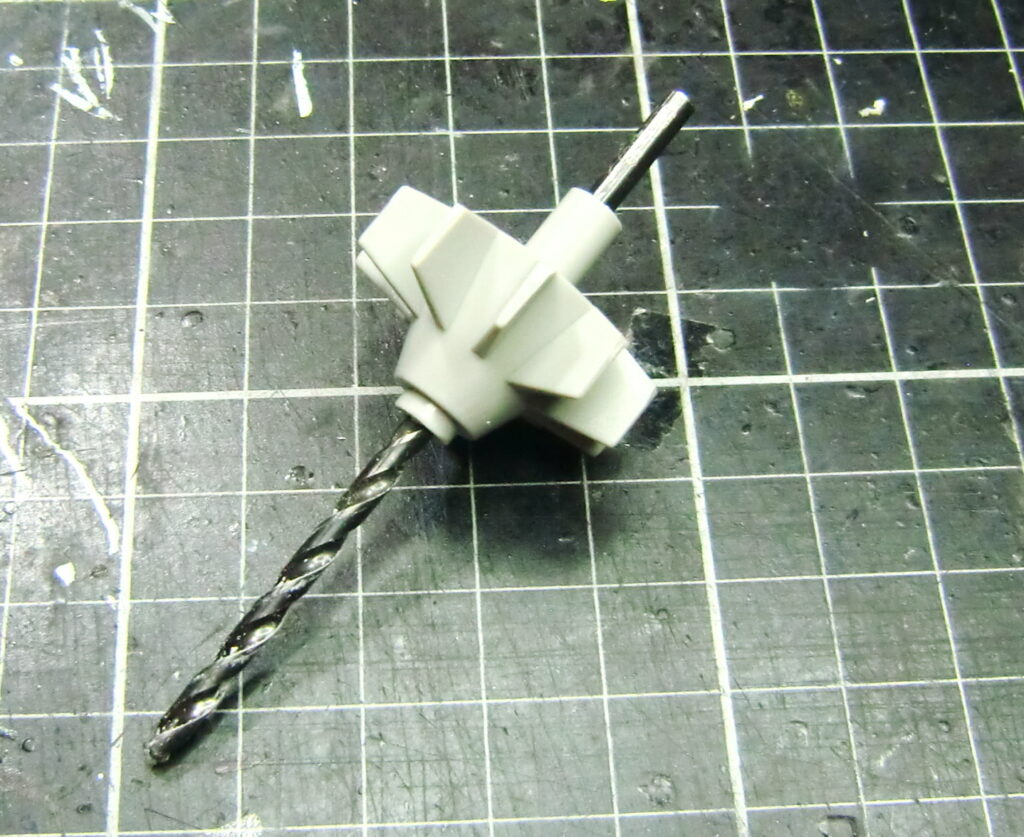
続いて、穴あけした箇所に金属パイプ(外形3.0/内径2.0/長さ:60mm)を差し込みます。

パイプ表面に薄くボンド塗ってから、回転させて差し込んでいきます。
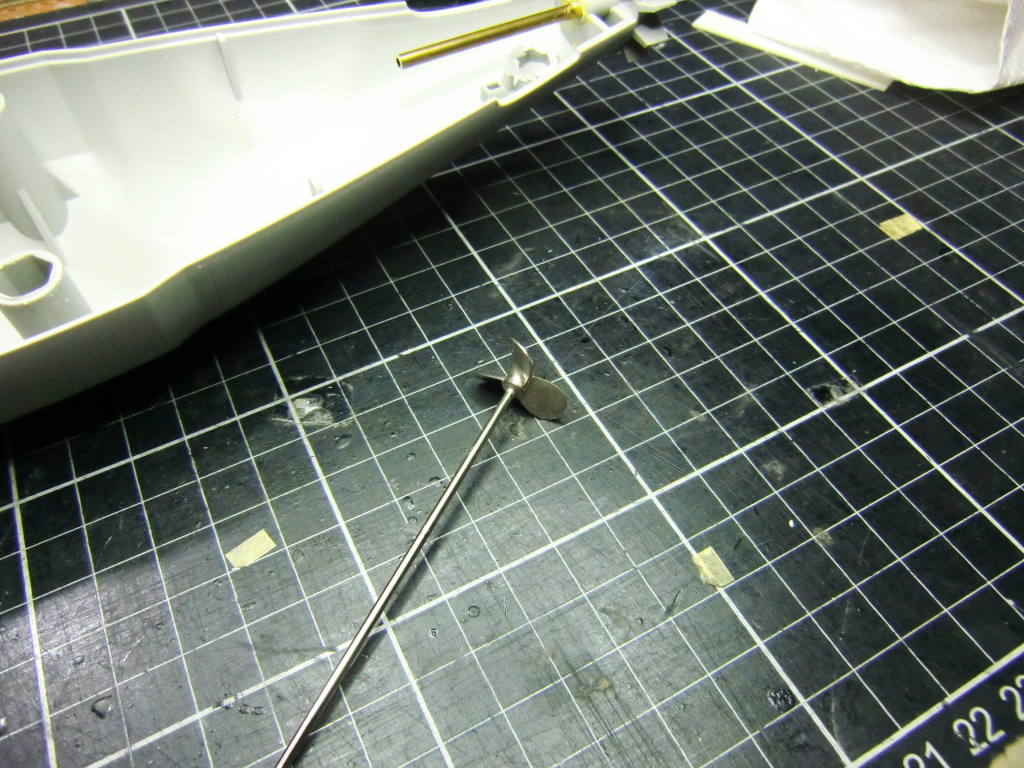
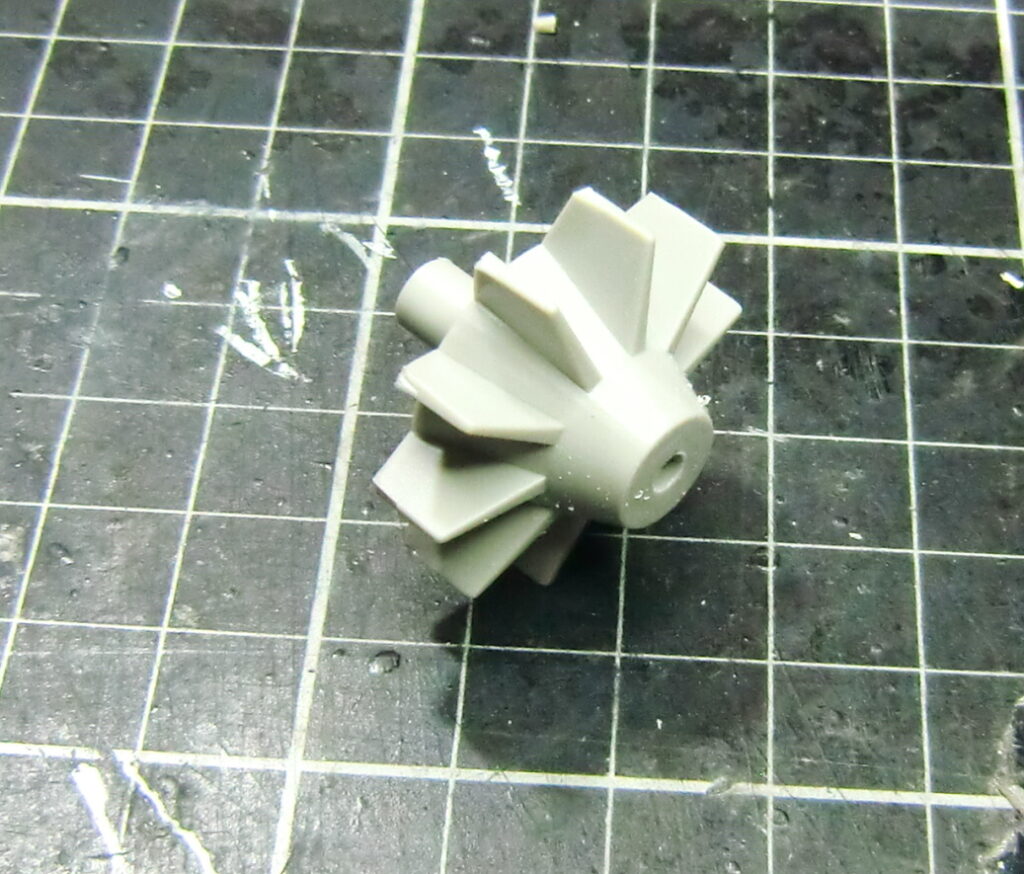
ステンレス製スクリューを差し込みます。

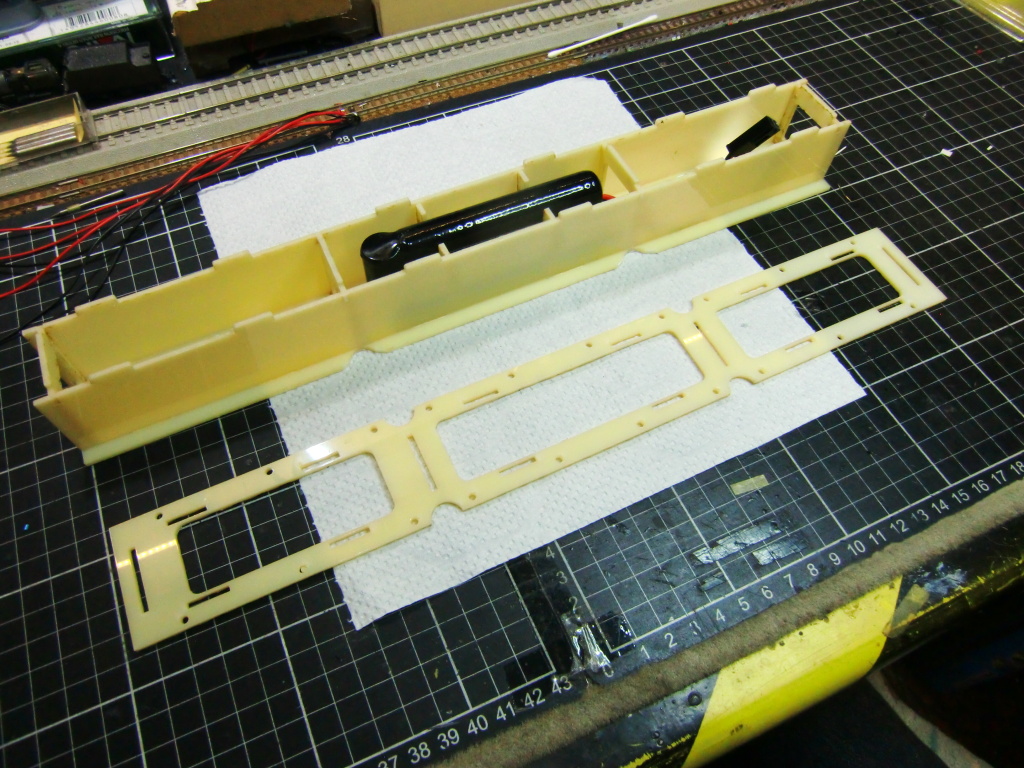
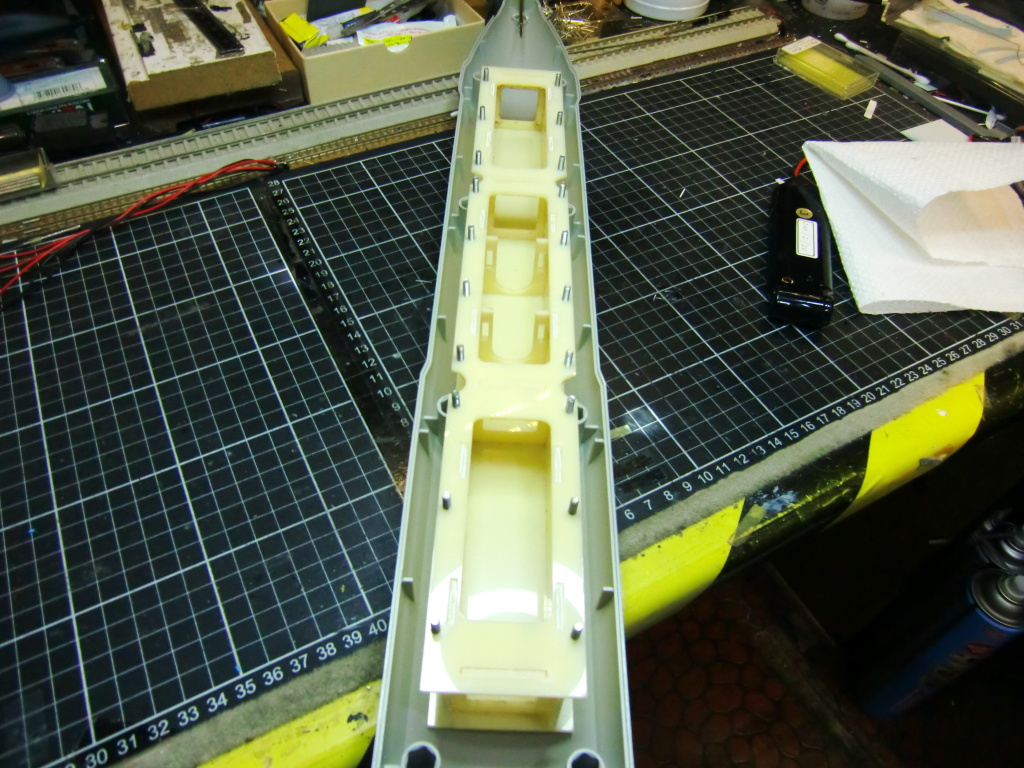
▼メカBOX
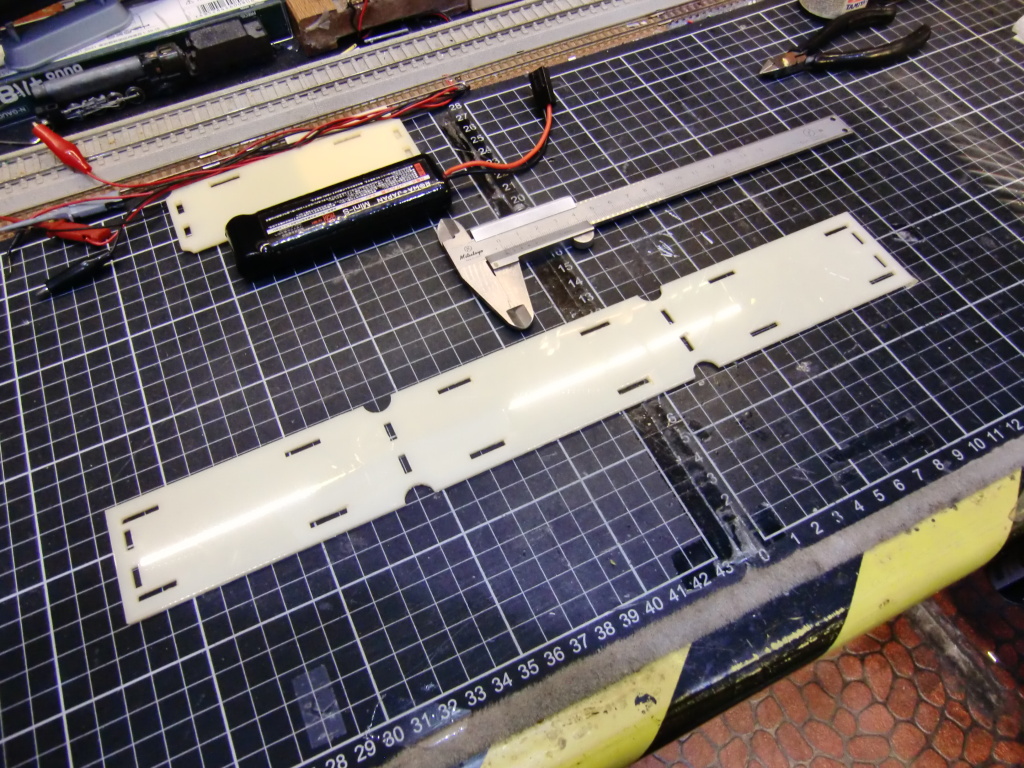
ABS板を上記のように切り出します。
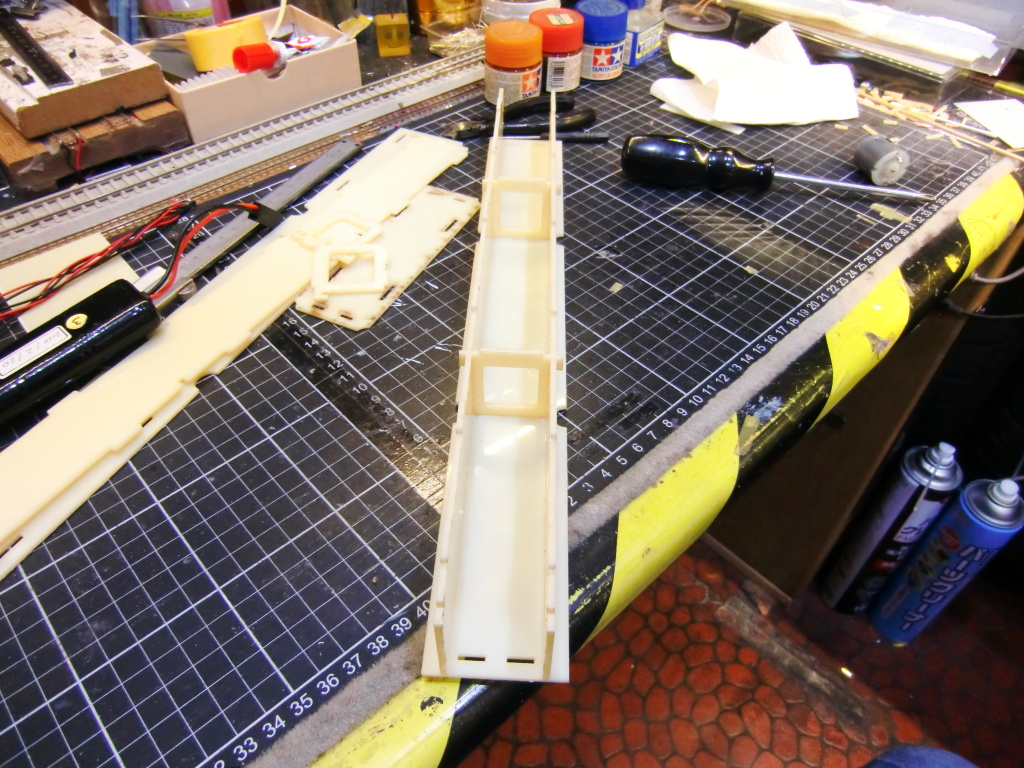
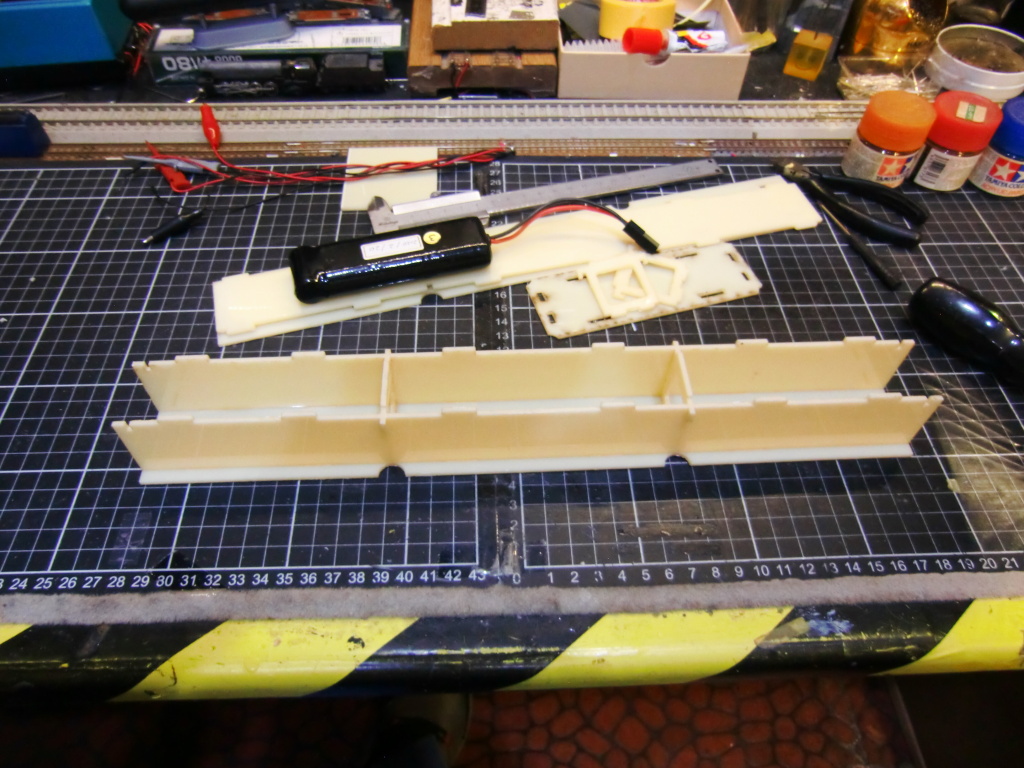
組み立てるとこのようになります。
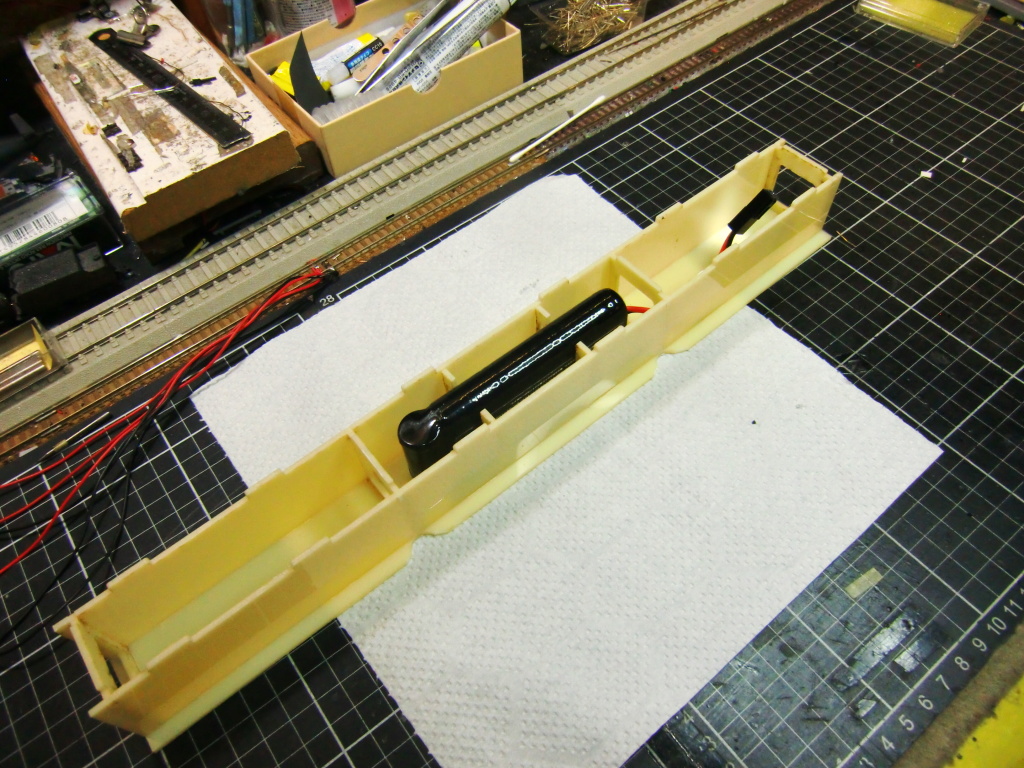
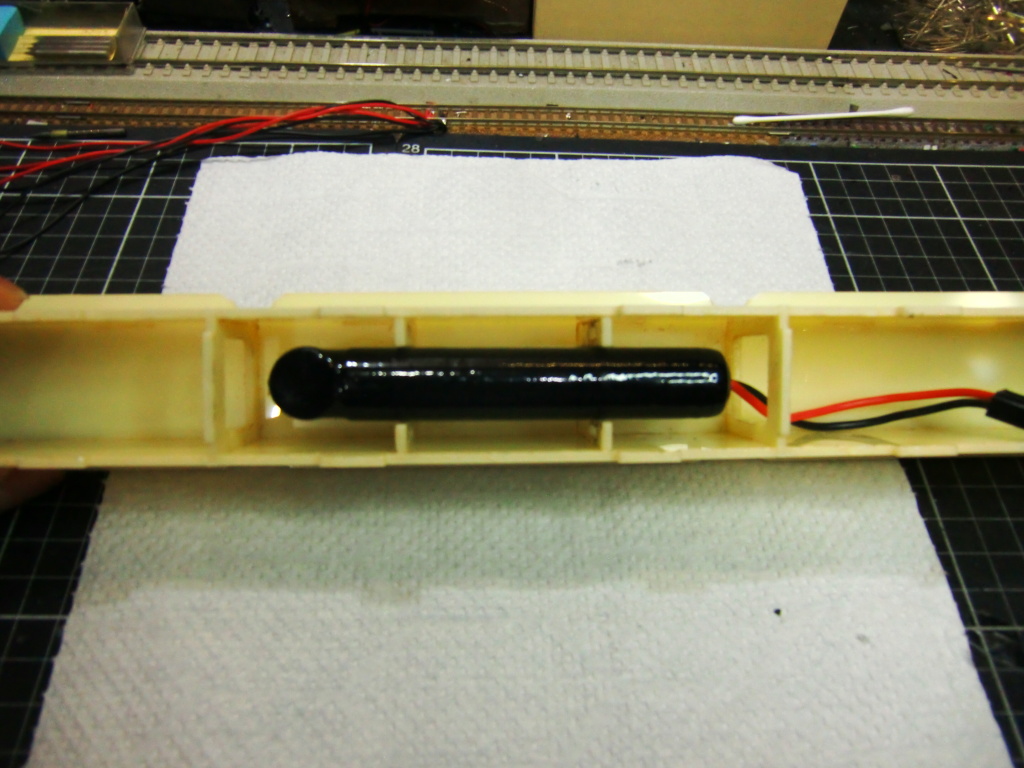
中央にバッテリーを配置するように設計してあります。
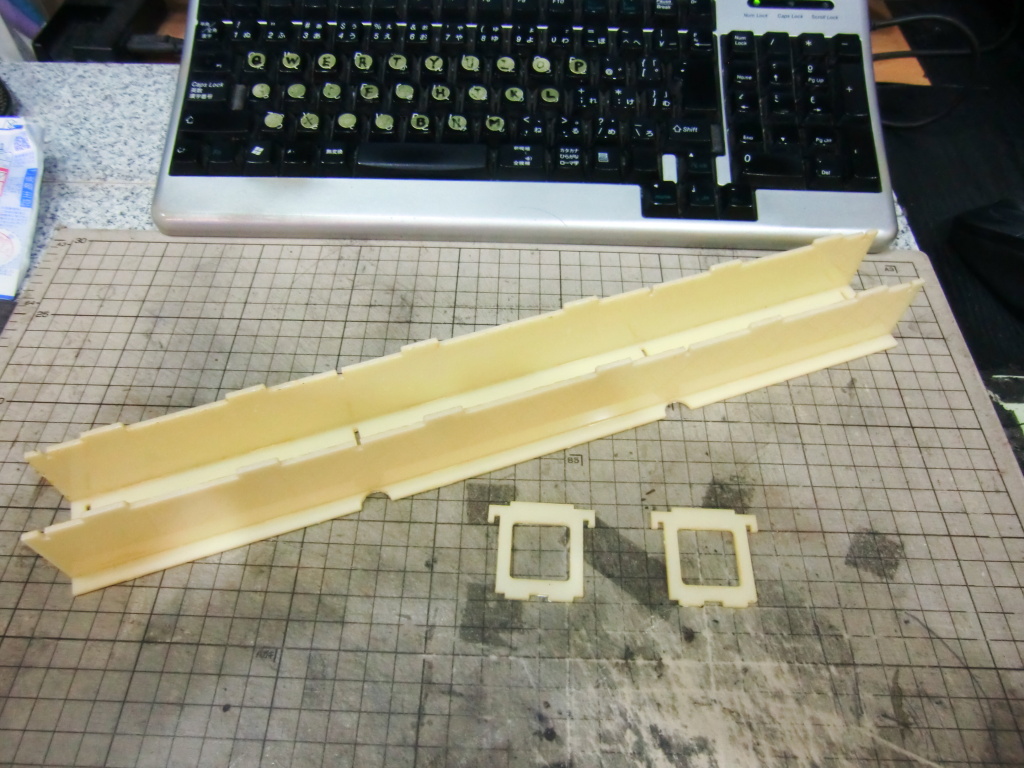
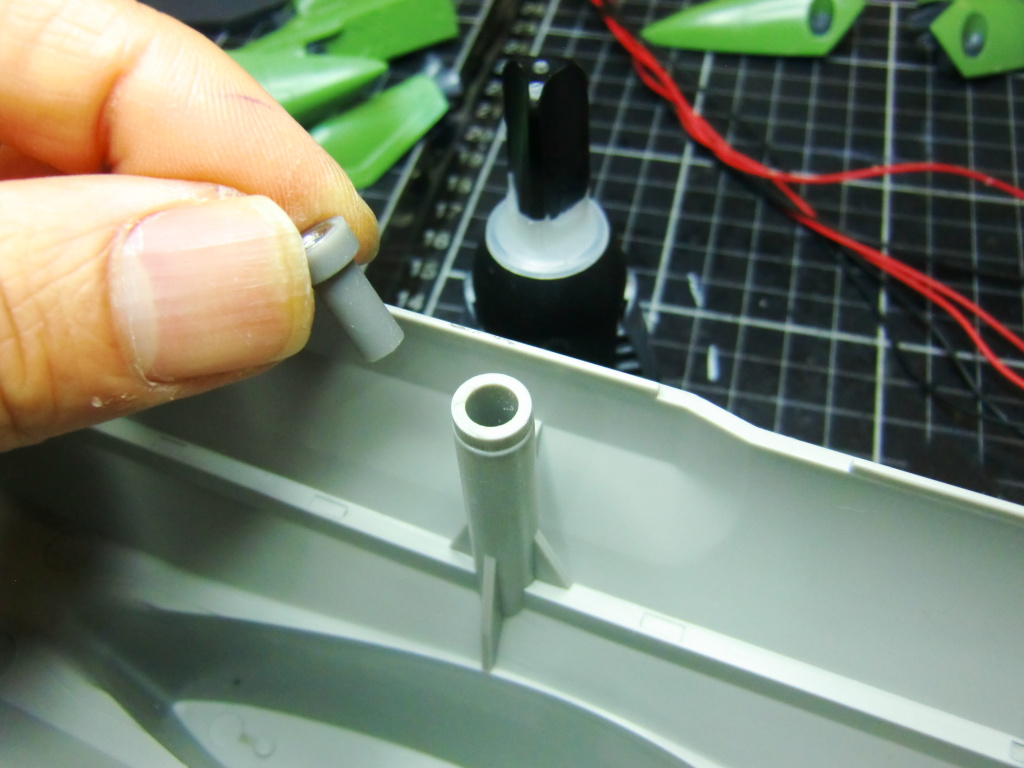
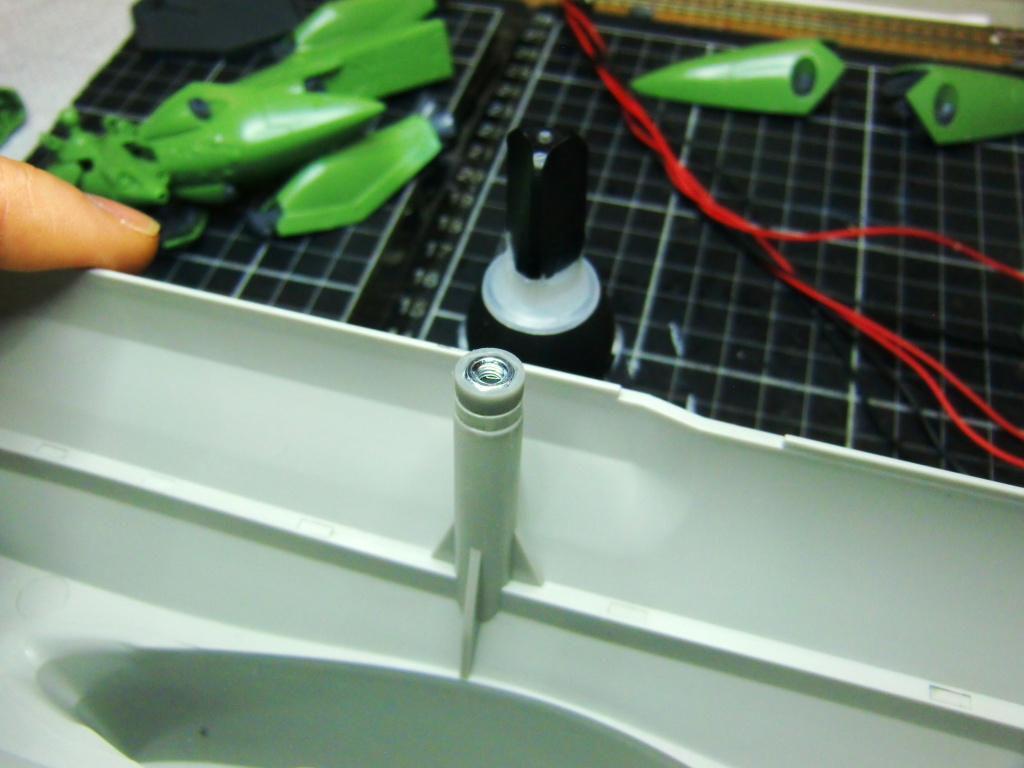
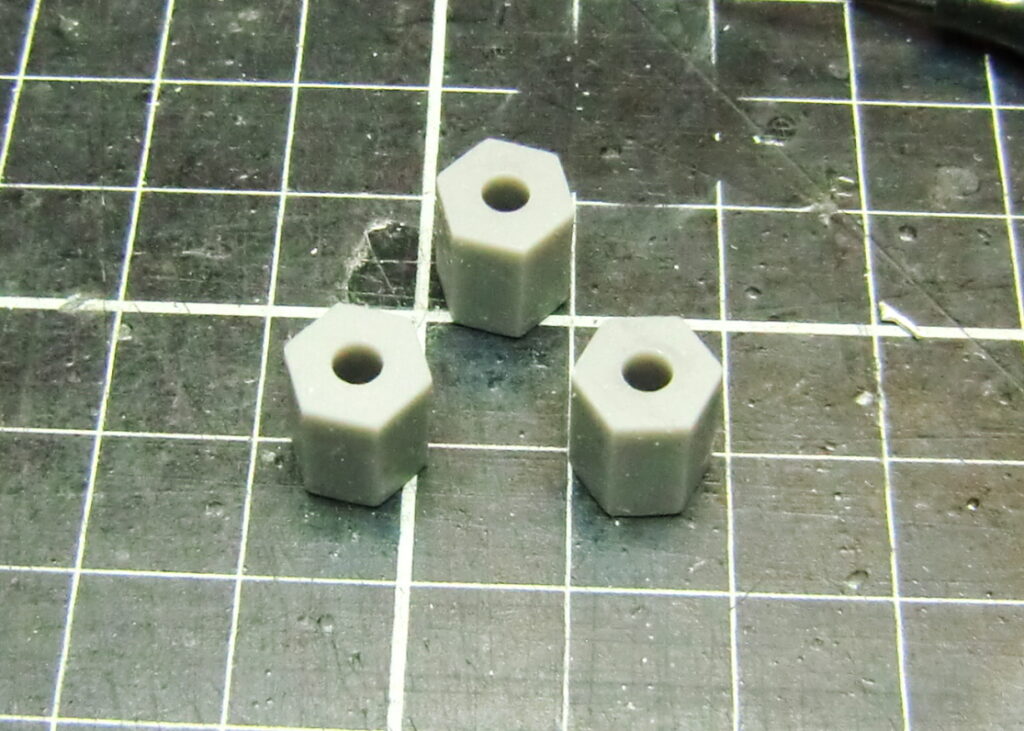
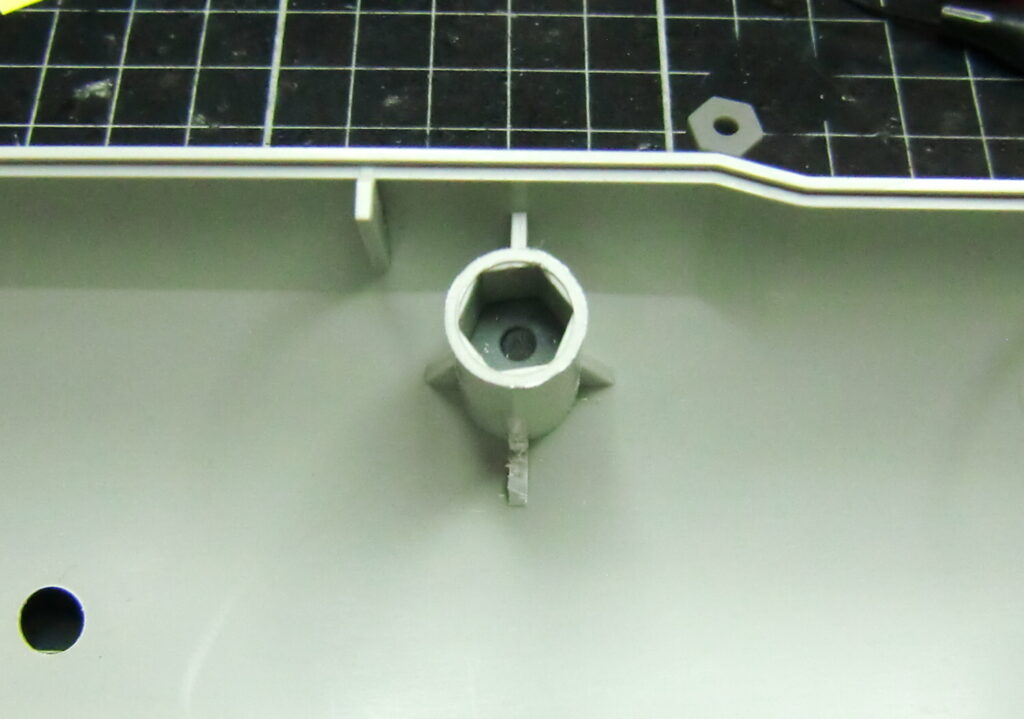
上面パーツ制作して逆ネジをはめ込みます。
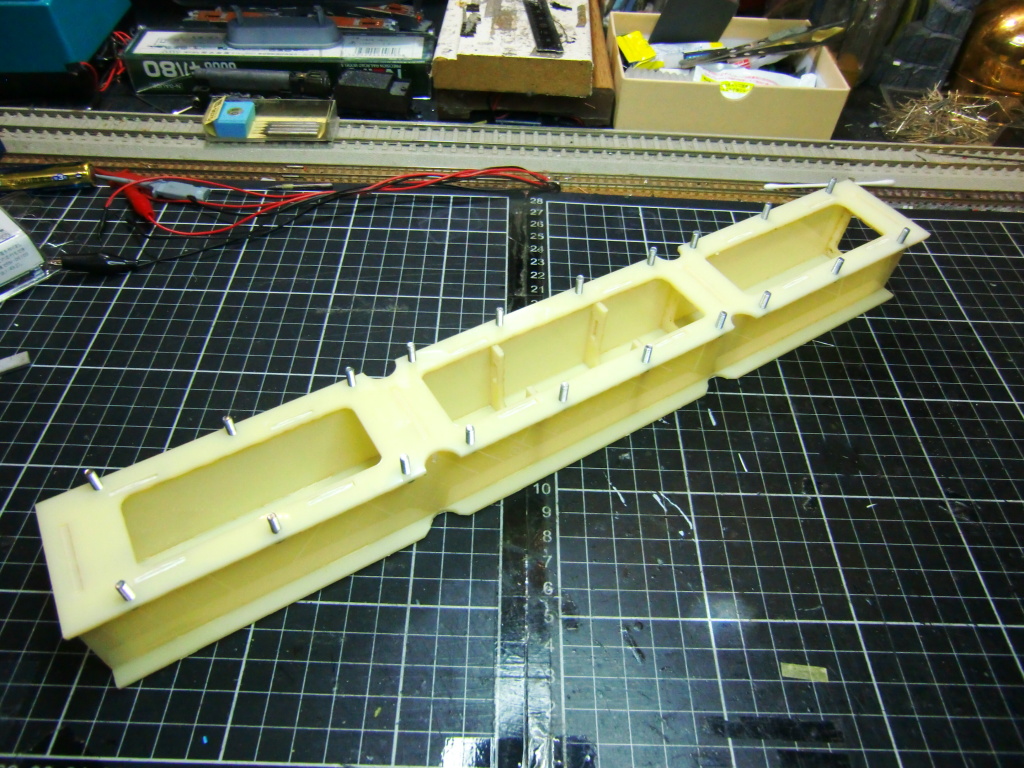
このようになります。
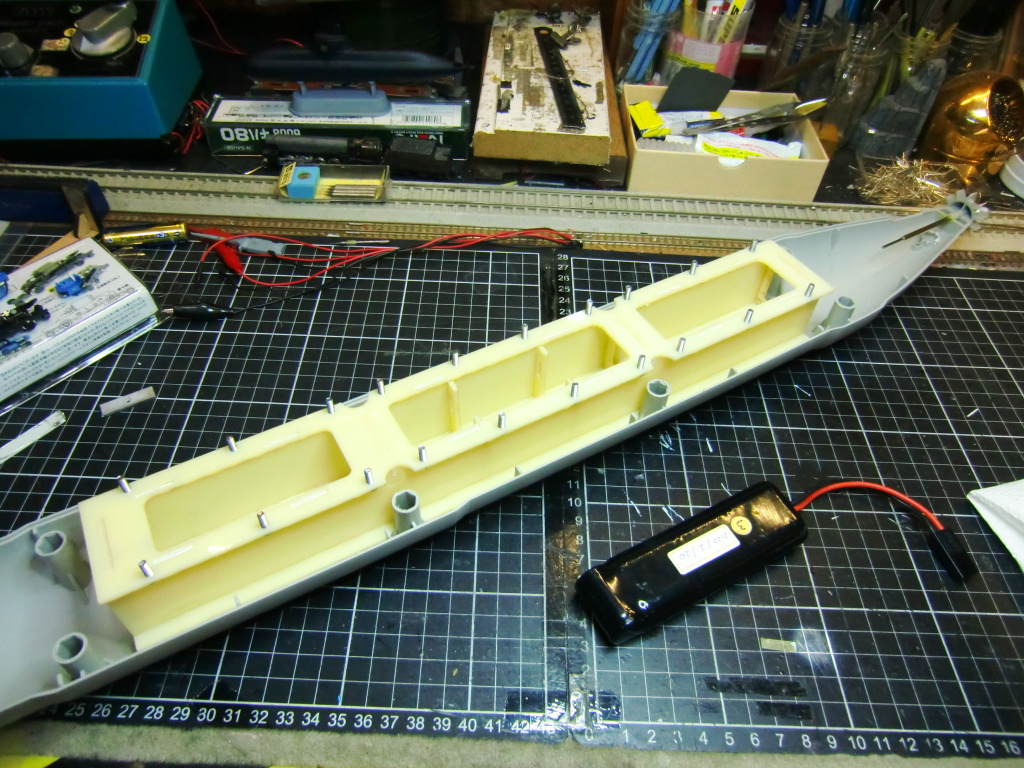
船体に組み込むとこのようになります。
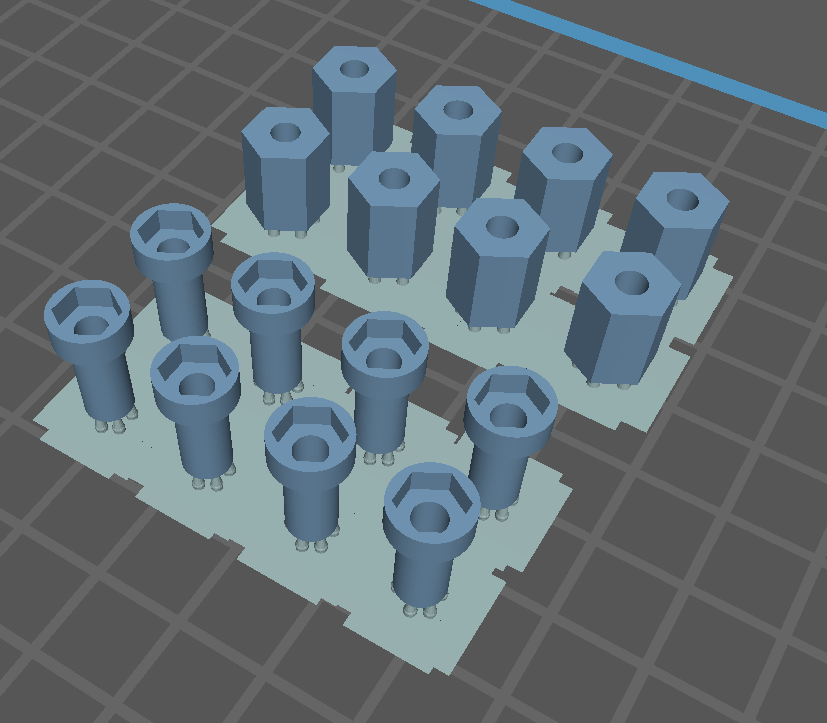
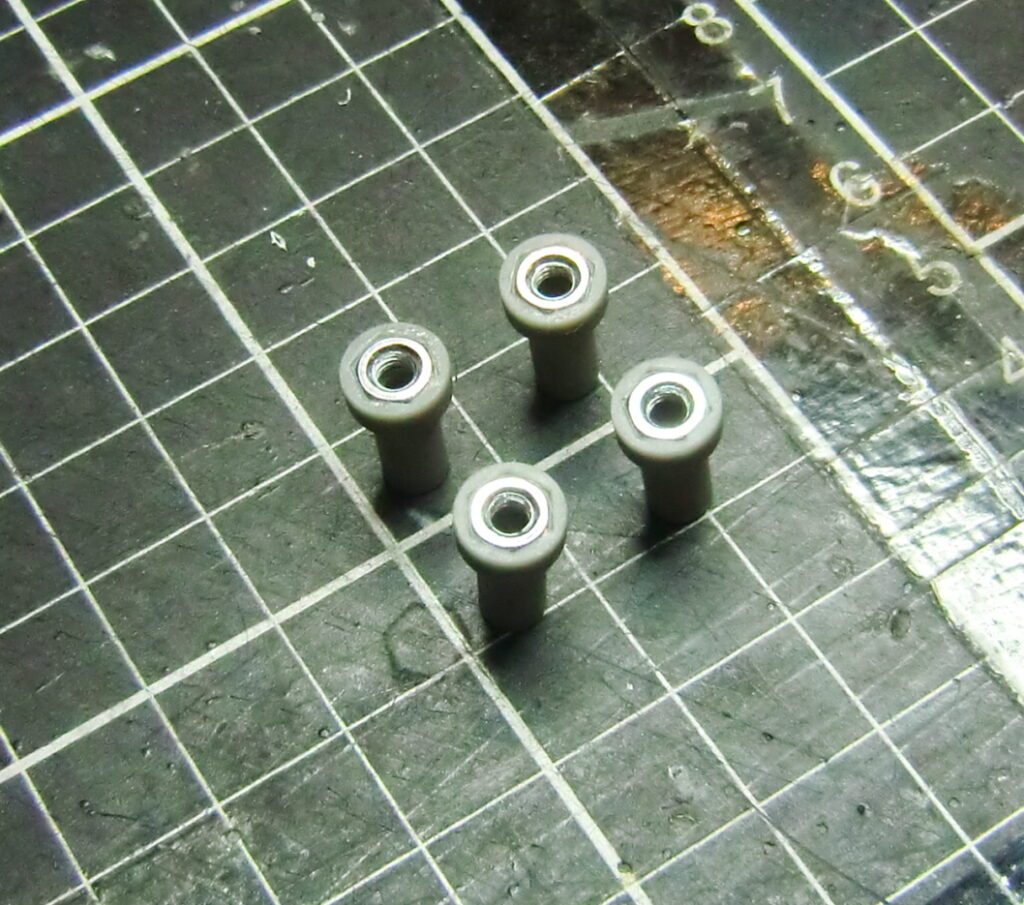
▼潜舵組込み


「内径:2.01mm」のハトメを両側に埋め込みます。

そこに「ステンレスシャフト」を差し込みます。ここではまだ固定しません。
特に問題がなければいったんシャフトを引き抜きます。
▼船体分割固定パーツの制作

船体前側の左右に1カ所ずつ穴あけを行います。

続いて船体底にドリルで6mmの穴を開けます。中央2カ所(写真では左右)は、船体内に水を取り込むための注水口となります。
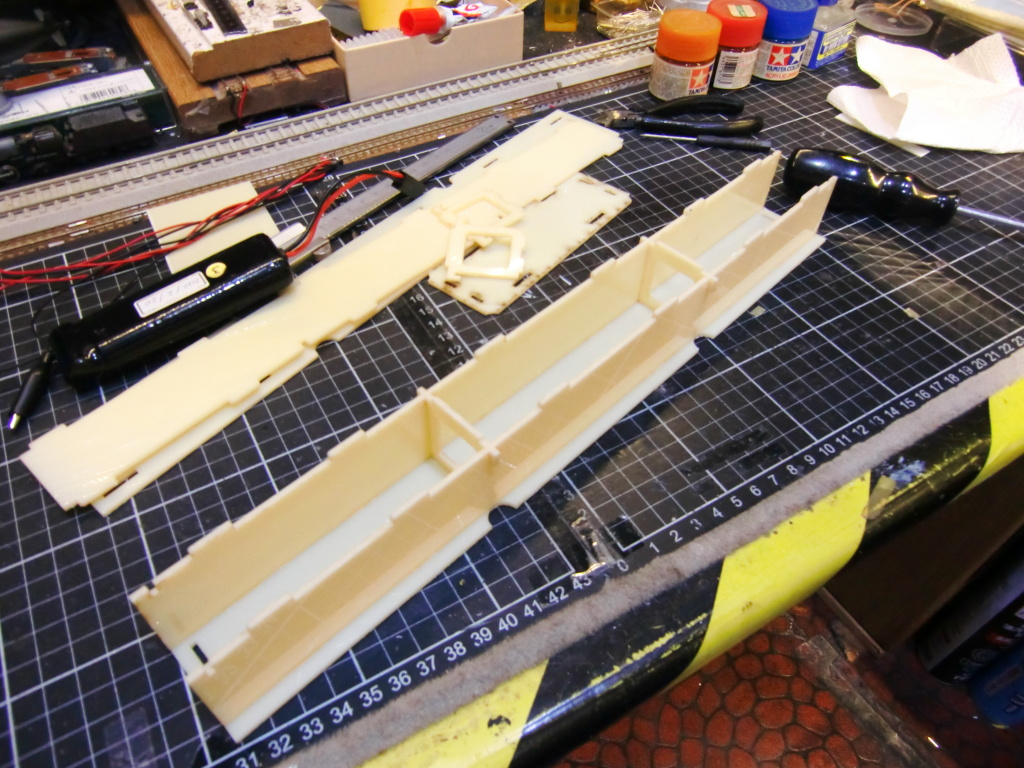
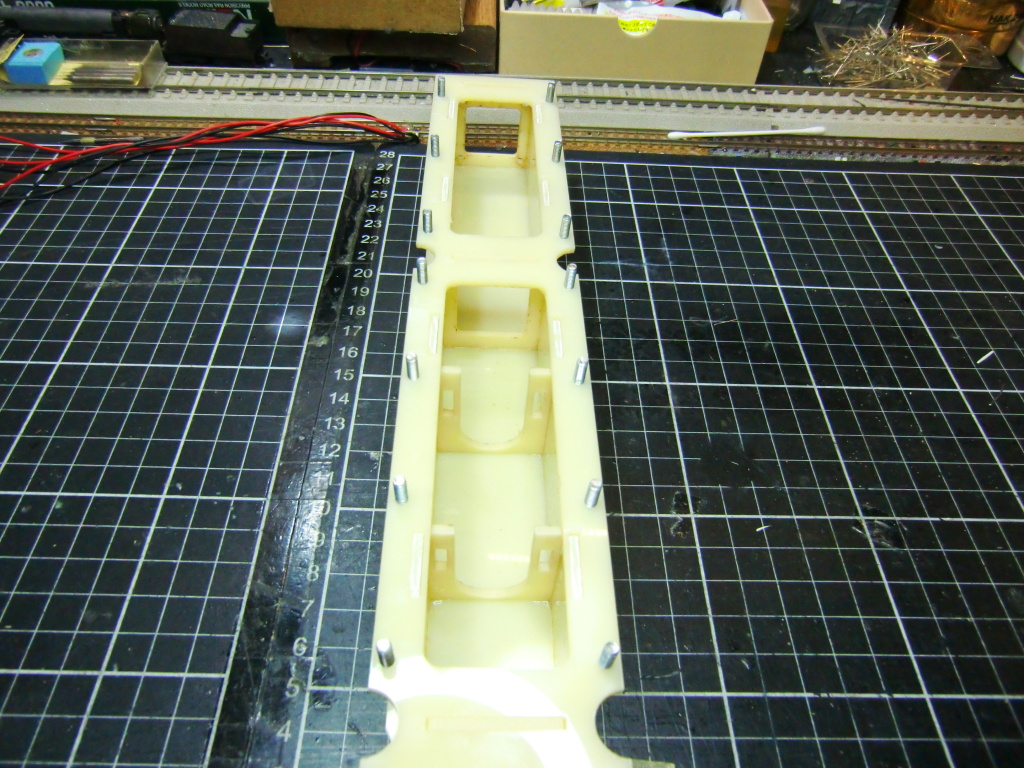
このような部品を設計して車体に組み込みます。

内側に接着剤を流してしっかり固定します。

このようになります。※船体上
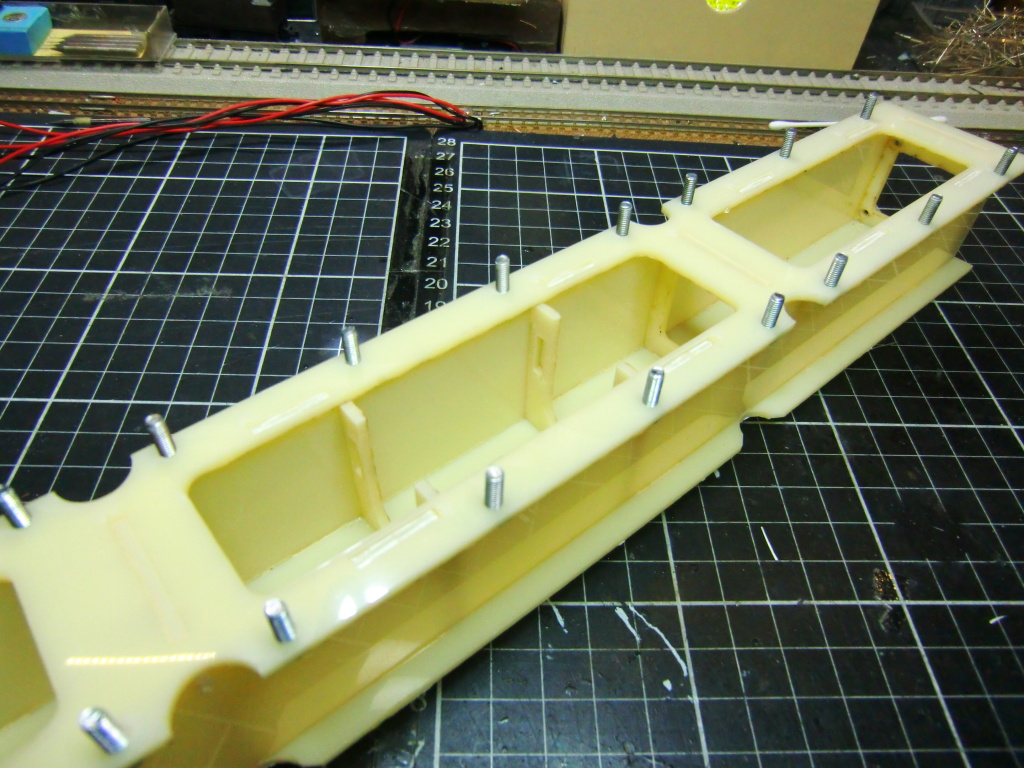
全部取り付ける必要はありません。中央よりの4箇所のみです。
こちらのパーツは、船体下(写真右)に埋め込みます。
これで船体上下をネジで閉じることができます。
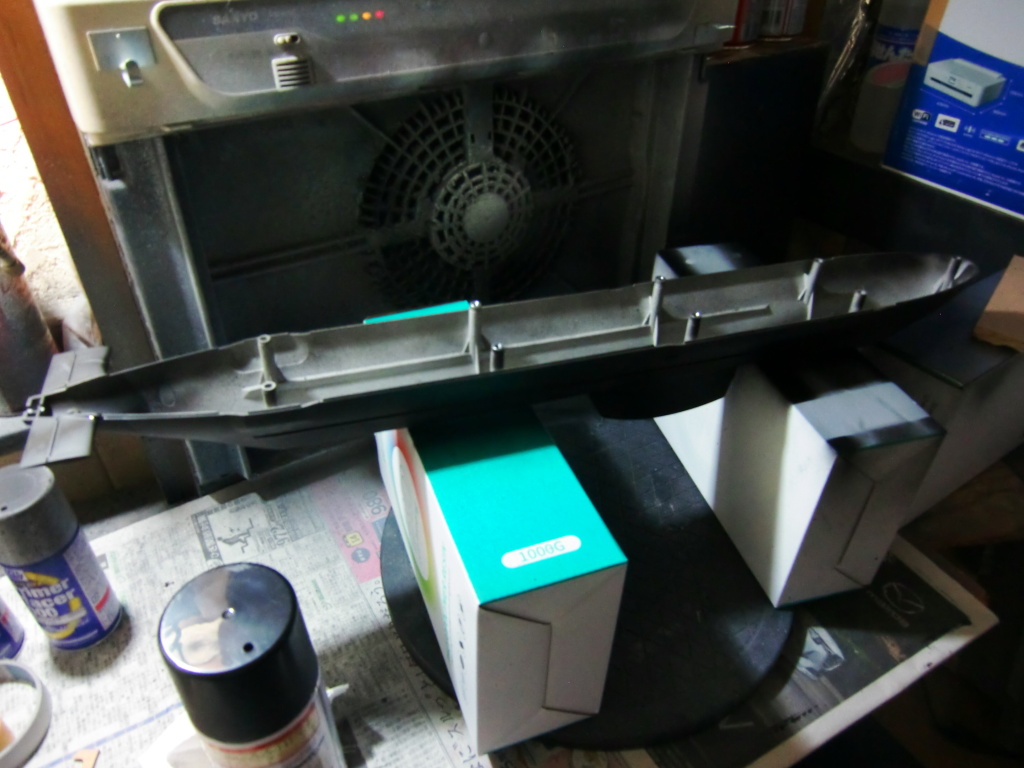
▼塗装作業

泡洗剤とシャワーで塗装前にしっかり油分を落とします。

普段はシャワーを使いませんが、今回はやや大きさがありますので、シャワーを使うと効率的です。そのあと水分をしっかりと拭きとってから、しばらく自然乾燥させます。

乾燥が終ったら基本塗装の前に、プラサフ(下地)をまんべんなく吹きます。

続いて「つや消し黒」を複数回に分けて吹き付けていき、塗膜を徐々に厚くしていきます。

潜水艦らしい深みのある黒になりました。


船体の基本塗装が終ったところで、デカール貼り「高耐久つや消しクリアー」を2~3回に分けて塗膜を厚くしていきます。

次に船体にウェザリング処理を施していきます。




▼潜水テスト用ミニプール
潜水テスト用のフレーム式プールです。「満水量:4,000リットル」

サイズ:幅:3m /奥行:2m/水深:75cm
決して充分な大きさとは言えませんが、動作テストのみにおいては特に問題ありません。
▼ピストンバラスト
比較的シンプルな構造で実現できそうな方法から試していきます。テストにあたり準備するものは以下の通りです。
- 空気ダメ容器
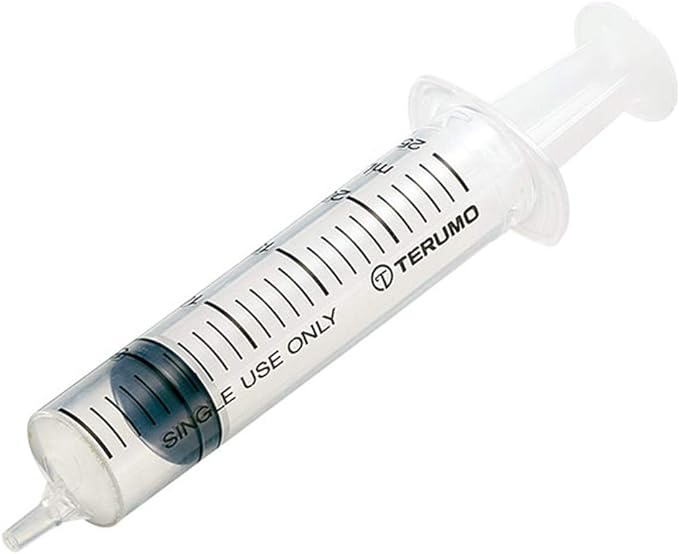
- シリンジ60ml
- 小型真空ポンプ x 2基
- テスト用電池BOX
- 極性切り替えスイッチ
- ON/OFFスイッチ
初めのテストとしては、こんなところでしょうか。
Youtubeに大変すばらしい動画がアップされておりました。
▼潜水テスト
上記の映像に登場する制作域に到達するまで先は長そうです。まずは初歩的な仕組みから理解して1つ1つ進めていくことにしましょう。
まずは、潜水と浮上の仕組みを理解する上でも試作を作りながらいろいろテストしていくところから始めます。
最初は簡単な構造からテストして実際に浮き沈みするか見ていきます。使用する材料は以下の通りです。
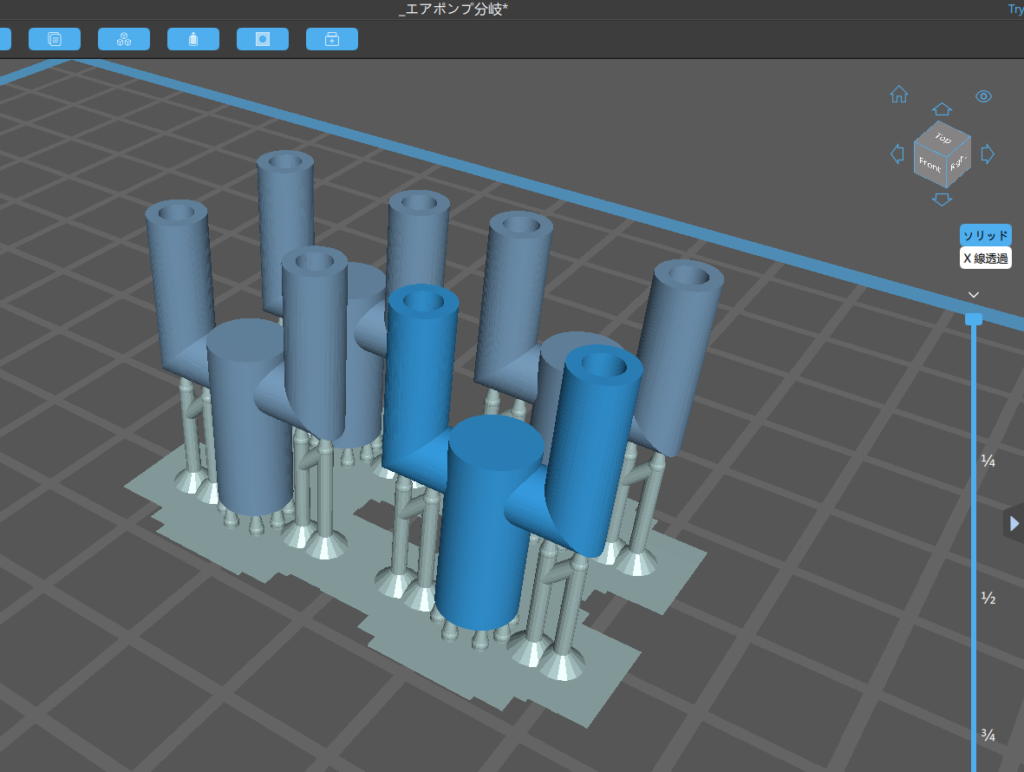
・シリンジ 25ml x 1/マイクロポンプ x 2/エアチューブ分配 x 1
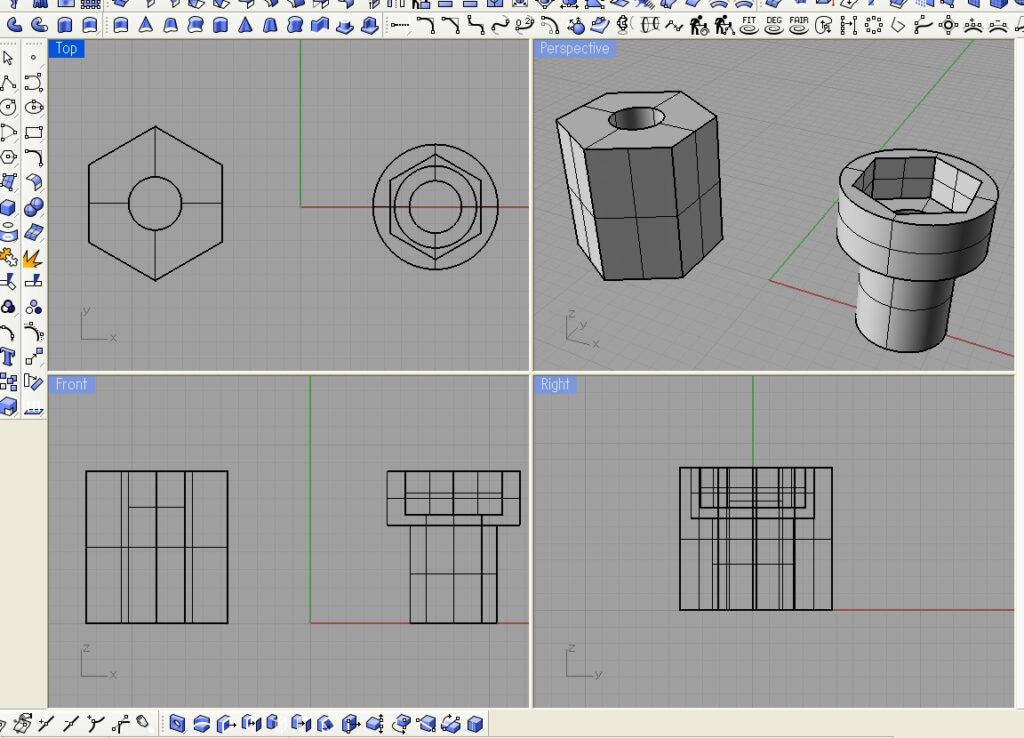
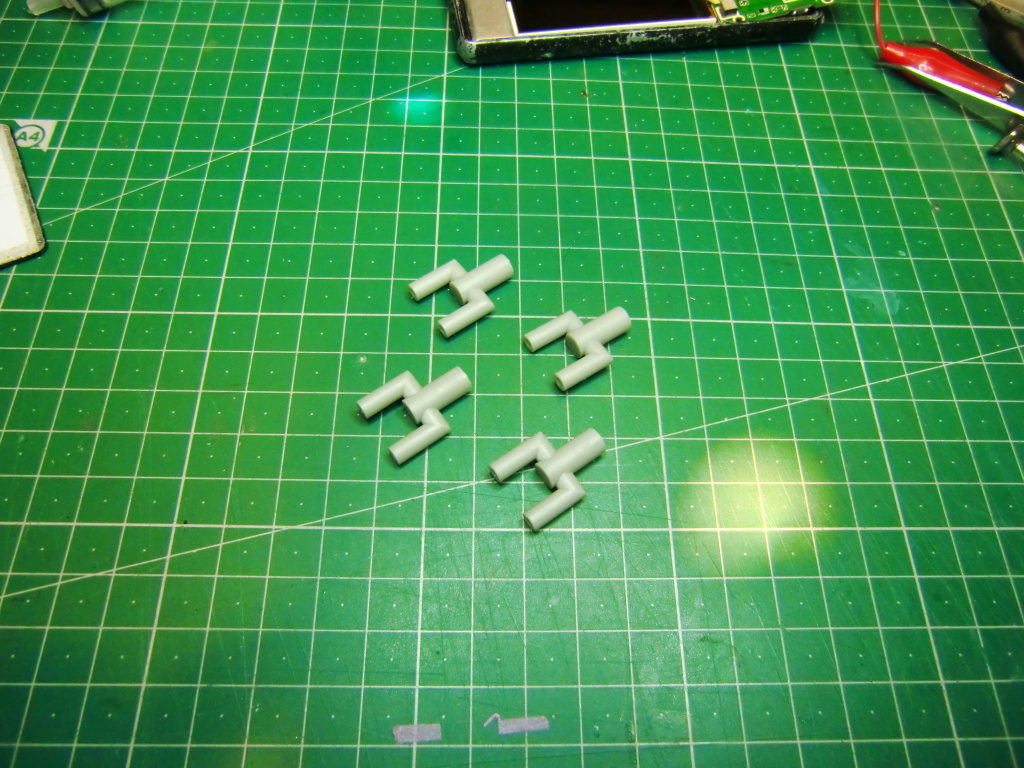
エアチューブ分配器については、3Dプリンターで作りました。
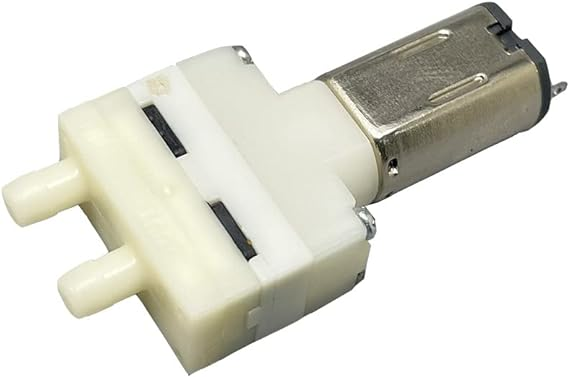
マイクロエアーポンプは2個使います。理想は、極性を変えることでエアーの方向を変えることができればよかったのですが、片方向のみしか対応していません。そのため、注水と排水の機能を持たせるには2個必要となります。
▼試作バラストタンク組立
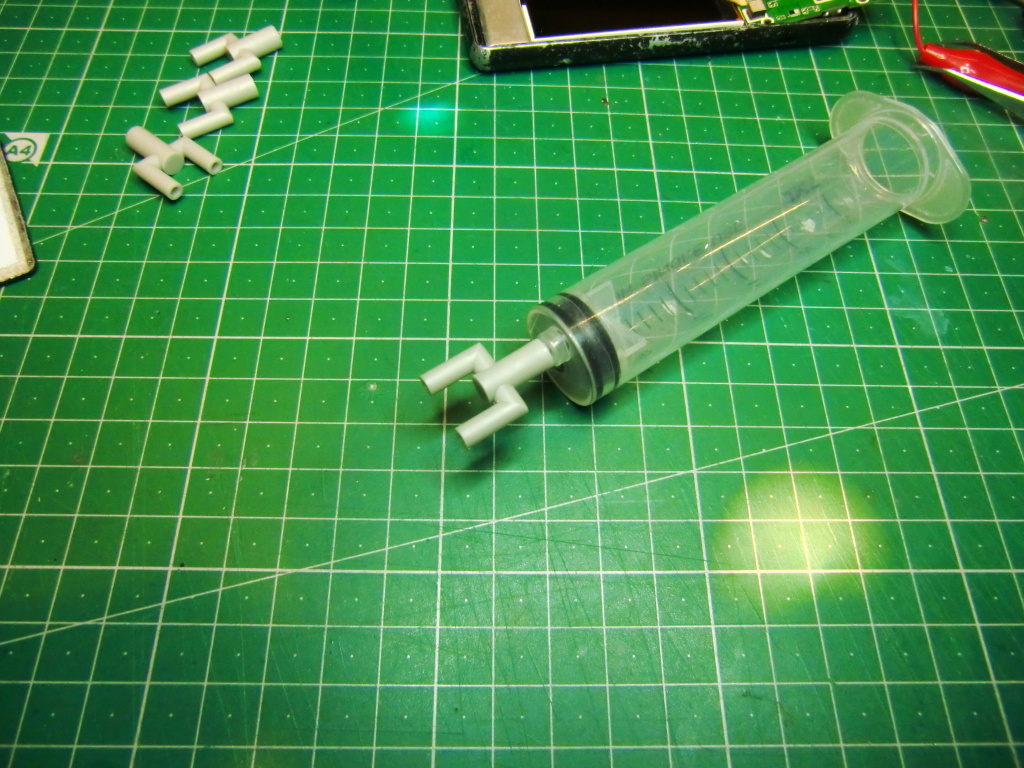
上記の部品を組み合わせて試作バラストタンクを作ってみることにします。
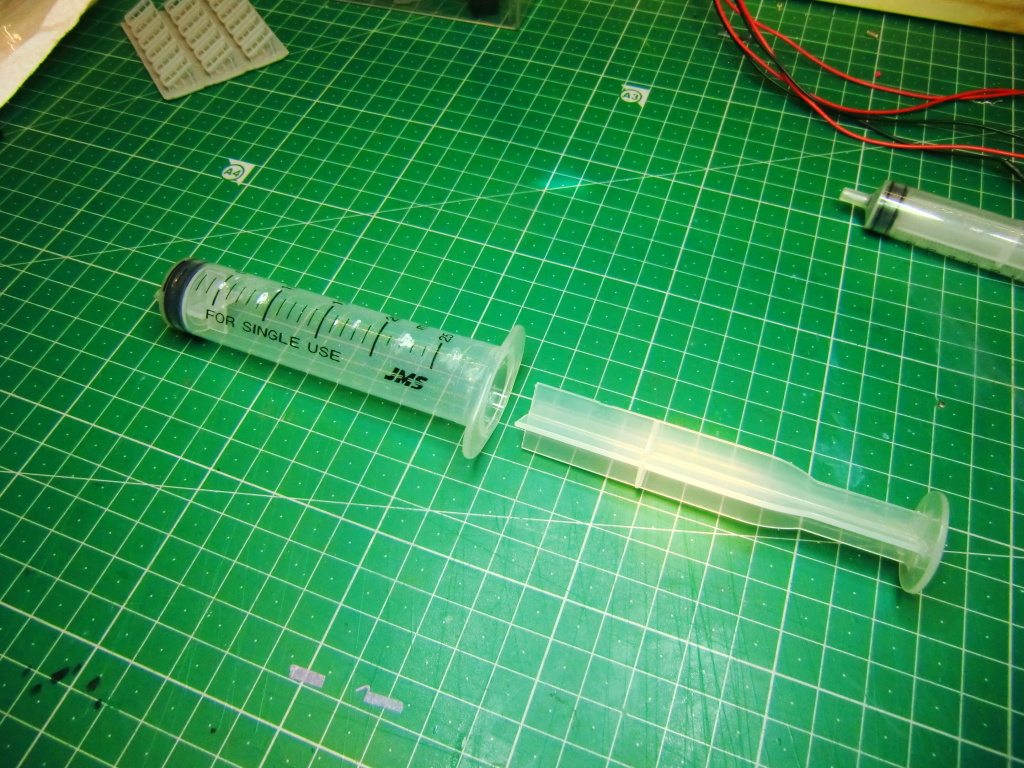

シリンジを上記のようにカットします。※左写真、右はカット後
次に先端に制作したエア分配器を取り付けます。

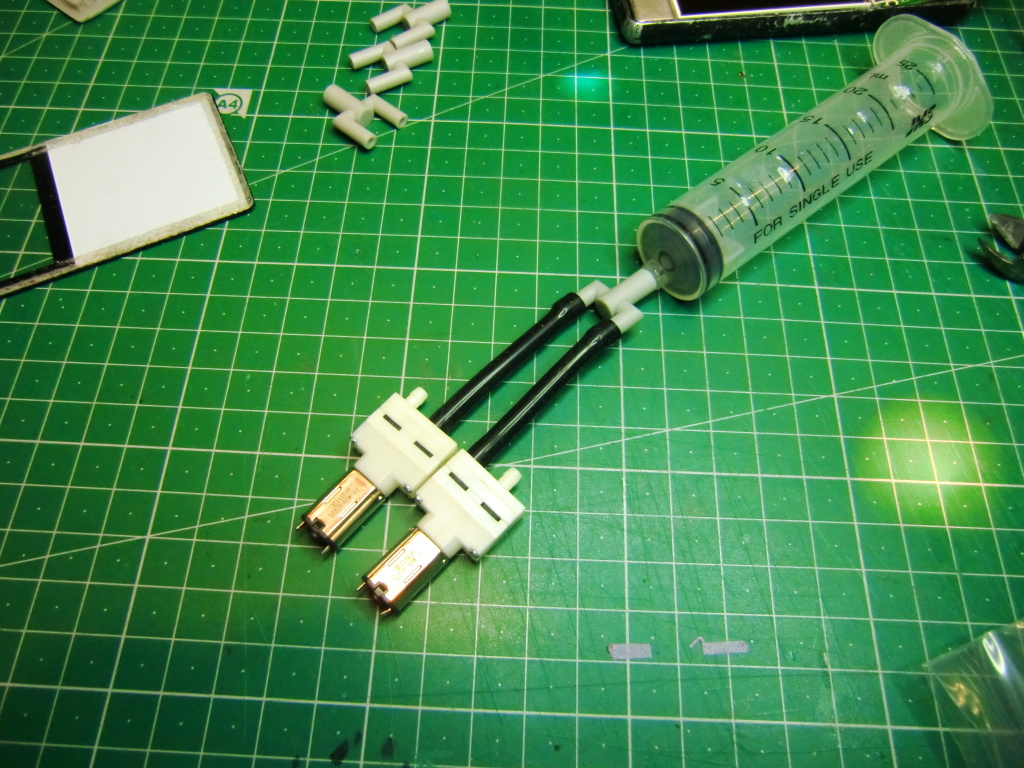
上記の接続によりシリンダー内のピストンが正常に動作するか試してみましたが、結果うまくいきませんでした。ミニポンプ内部の構造により逆流する空気の流れを遮断できていないようです。このことで、外に空気が漏れ出すことで、ピストンを動かすだけの力を失います。それぞれに電磁弁を間に追加することでピストンを動作させることはできますが、部品点数が増えるのはあまり好ましくありません。また、極性を変えることで両方向に対応したマイクロポンプも存在しますが、大変高価であまり現実的ではありません。※上記ポンプ単価の10倍以上します。
マイクロ蠕動ポンプを試してみることに。
ダイヤフラム式ポンプと違い、蠕動ポンプでは極性を変えることで簡単に空気の流れを変えることができそうです。早速ためしてみることにします。
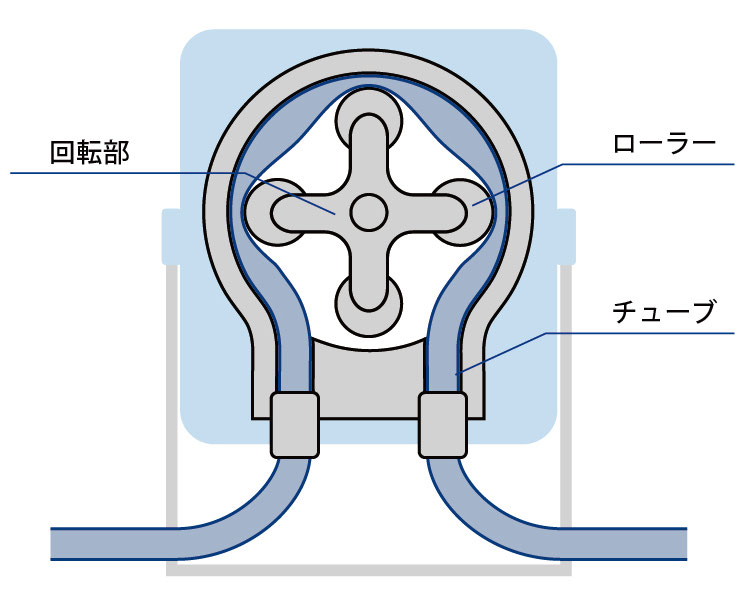
構造と仕組み
ポンプ構造は、周囲にローラーが取り付けられており、周囲にチューブを取り付けます。ローラーと外壁に挟まれることでチューブが押しつぶされた状態となり吸い込み側には負圧が発生することで吸い込む力が発生します。吸い込んだ空気はそのまま吐出側に送られることになります。